Delta DVP-ES2 User Manual
Page 689
7 C AN o p e n F u n c t i o n a n d O p e r a t i o n
7 - 3 3
PDO transmission type can be synchronous transmission and asynchronous transmission.
In synchronous transmission, master will send out the SYNC message in the fixed cycle.
The length of the cycle is set in master properties dialog box with the default value: 50ms.
In asynchronous transmission, the message is sent out once the PDO mapping parameter
is changed.
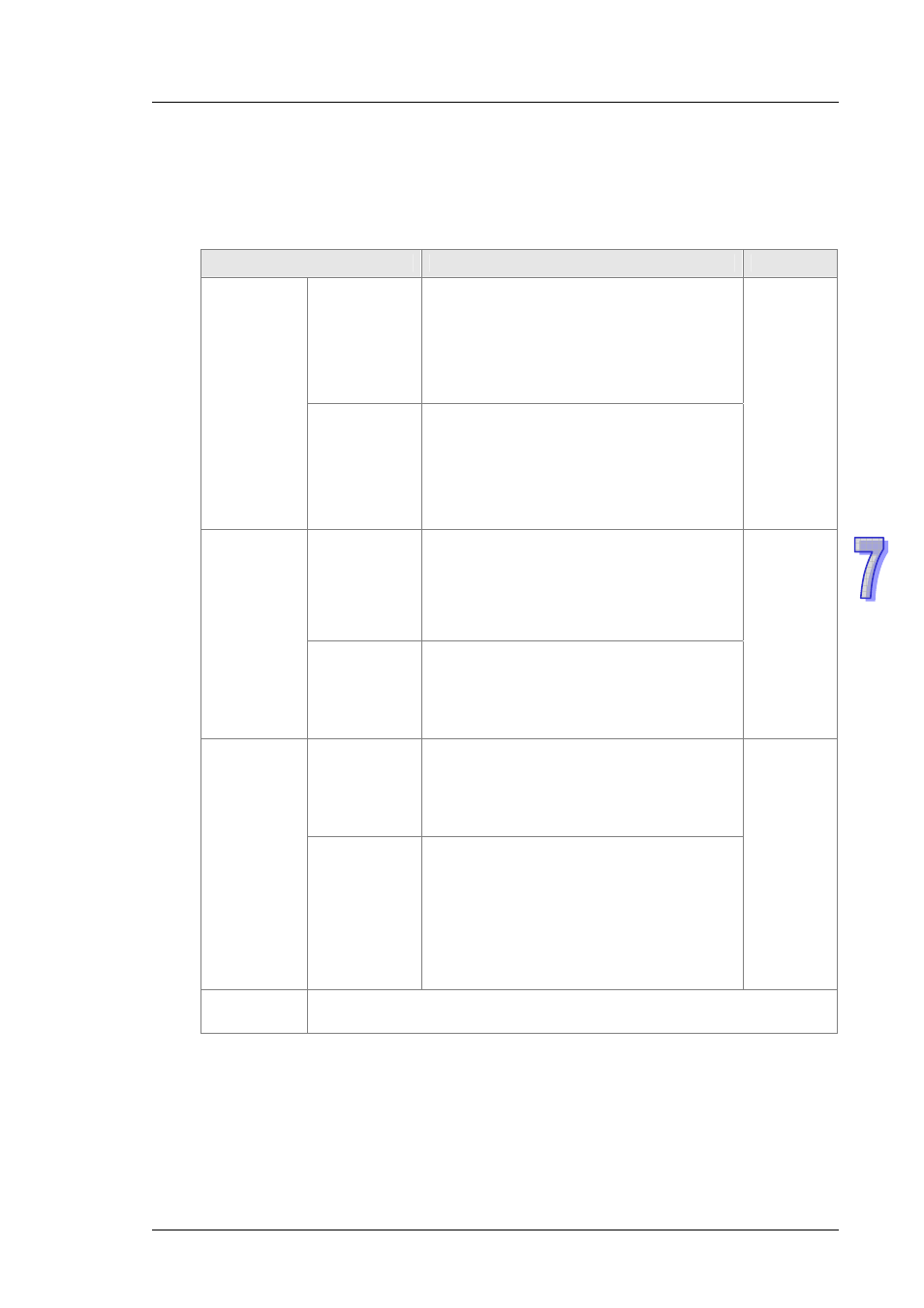
PDO Transmission types in details are introduced in the following table.
Transmission Type
Description
Remark
RxPDO
Once any change for the mapped data
happens, RxPDO data are sent out
immediately. The data that slave receives
are valid only when receiving the next
SYNCH message. If no change for RxPDO
data, they are not sent out.
0
TxPDO
Once any change for the mapped data
happens and slave receives the SYNC
message, the data are sent out immediately.
The TxPDO data are valid immediately after
master receives them. If no change for
TxPDO data, the data are not sent out.
SYNCH
SYNCH
non-cycle
RxPDO
After N messages are sent out and no
matter whether the mapped data are
changed, the data that slave receives will be
valid only when receiving the next SYNCH
message.
N
(N:1~240)
TxPDO
After N messages are sent out and no
matter whether the mapped data are
changed, the data that master receives will
be valid at once.
SYNCH
cycle
RxPDO
The mapped data are sent out immediately
once changed and they are valid once they
are received by slave. RxPDO data will not
be sent out if no change for the data.
254
TxPDO
Slave sends out the data once every one
Event timer time and after that, the TxPDO
data are not allowed to be sent out within an
inhibit timer time.
When Event timer and Inhibit timer are both
equal to 0, TxPDO data are sent to master
immediately once changed and the data
that master receives will be valid at once.
ASYNCH
255 Same
as
Type254
Note:
1> Synchronous transmission type can fulfill multi-axis motion at the same time.
2> If user is going to monitor the real-time changing parameter such as the actual rotation
speed of the motor, we suggest TxPDO should be set as the synchronous transmission
type in case the frequent changing of slave data causes to block the CANopen network.