Cd e f, C d e f, D c f e – Delta DVP-ES2 User Manual
Page 290
D V P - E S 2 / E X 2 / S S 2 / S A2 / S X 2 / S E O p e r a t i o n M a n u a l - P r o g r a m m i n g
3 - 1 7 4
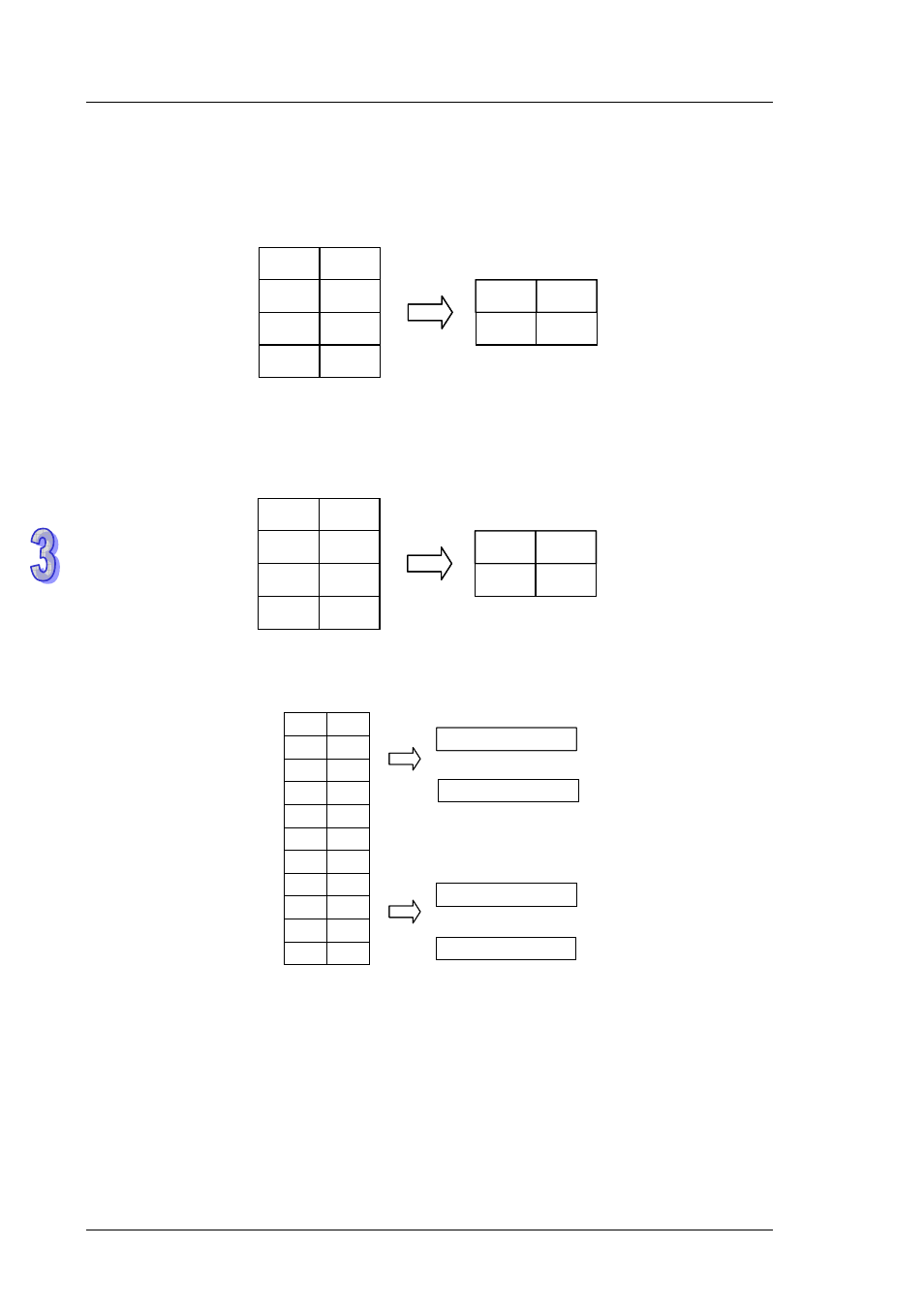
K6: When n = 4, transform 8-bit ASCII data (higher 4 bits, lower 4 bits) into HEX data in the
following rule: (ASCII value to be transformed includes 0 ~ 9 (0x30~0x39), A ~ F (0x41~0x46),
and a ~ f (0x61~0x66).)
c
d
e
f
Hi-byte Lo-byte
c d
e f
Hi-byte Lo-byte
c
d
e
f
Hi-byte Lo-byte
c d
e f
Hi-byte Lo-byte
K7: When n = 4, transform 8-bit ASCII data (lower 4 bits, higher 4 bits) into HEX data in the
following rule:
c
d
e
f
Hi-byte Lo-byte
d c
f e
Hi-byte Lo-byte
c
d
e
f
Hi-byte Lo-byte
d c
f e
Hi-byte Lo-byte
K8: Transform 8-bit GPS data into 32-bit floating point data in the following rule:
dd
mm
1
mm
2
mm
3
Hi-byte Lo-byte
dd.mm
1
mm
2
mm
3
dd
1
dd
0
.mm
1
mm
2
mm
3
32bit Floating (S+4=H4E )
4E
dd
1
dd
0
mm
1
mm
2
mm
3
45
S+0
–dd.mm
1
mm
2
mm
3
32bit Floating (S+4 != H4E )
S+1
S+2
S+3
S+4
S+5
S+6
S+7
S+8
S+9
S+10
32bit Floating (S+10=H45)
D+0
D+0
–dd
1
dd
0
.mm
1
mm
2
mm
3
32bit Floating (S+10 != H45)
D+2
D+2
dd
mm
1
mm
2
mm
3
Hi-byte Lo-byte
dd.mm
1
mm
2
mm
3
dd
1
dd
0
.mm
1
mm
2
mm
3
32bit Floating (S+4=H4E )
4E
dd
1
dd
0
mm
1
mm
2
mm
3
45
S+0
–dd.mm
1
mm
2
mm
3
32bit Floating (S+4 != H4E )
S+1
S+2
S+3
S+4
S+5
S+6
S+7
S+8
S+9
S+10
32bit Floating (S+10=H45)
D+0
D+0
–dd
1
dd
0
.mm
1
mm
2
mm
3
32bit Floating (S+10 != H45)
D+2
D+2
K9: Calculate the optimal frequency for positioning instructions with ramp up/ down function.
Users only need to set up the total number of pulses for positioning and the total time for
positioning first, DTM instruction will automatically calculate the optimal max output frequency
as well as the optimal start frequency for positioning instructions with ramp-up/down function
such as PLSR, DDRVI and DCLLM.