6 application example, Hareware connection, Setting servo parameters – Delta DVP-ES2 User Manual
Page 683
7 C AN o p e n F u n c t i o n a n d O p e r a t i o n
7 - 2 7
Code
Indication
How to correct
F4
BUS-OFF state is detected.
Check if CANopen bus cables are properly
connected and ensure that all the node
devices run at the same baud rate before
re-powering.
FB
The sending buffer in
DVP-ES2-C is full.
Check if the CANopen bus cable is properly
connected and then re-power.
FC
The receiving buffer in
DVP-ES2-C is full.
Check if the CANopen bus cable is properly
connected and then re-power.
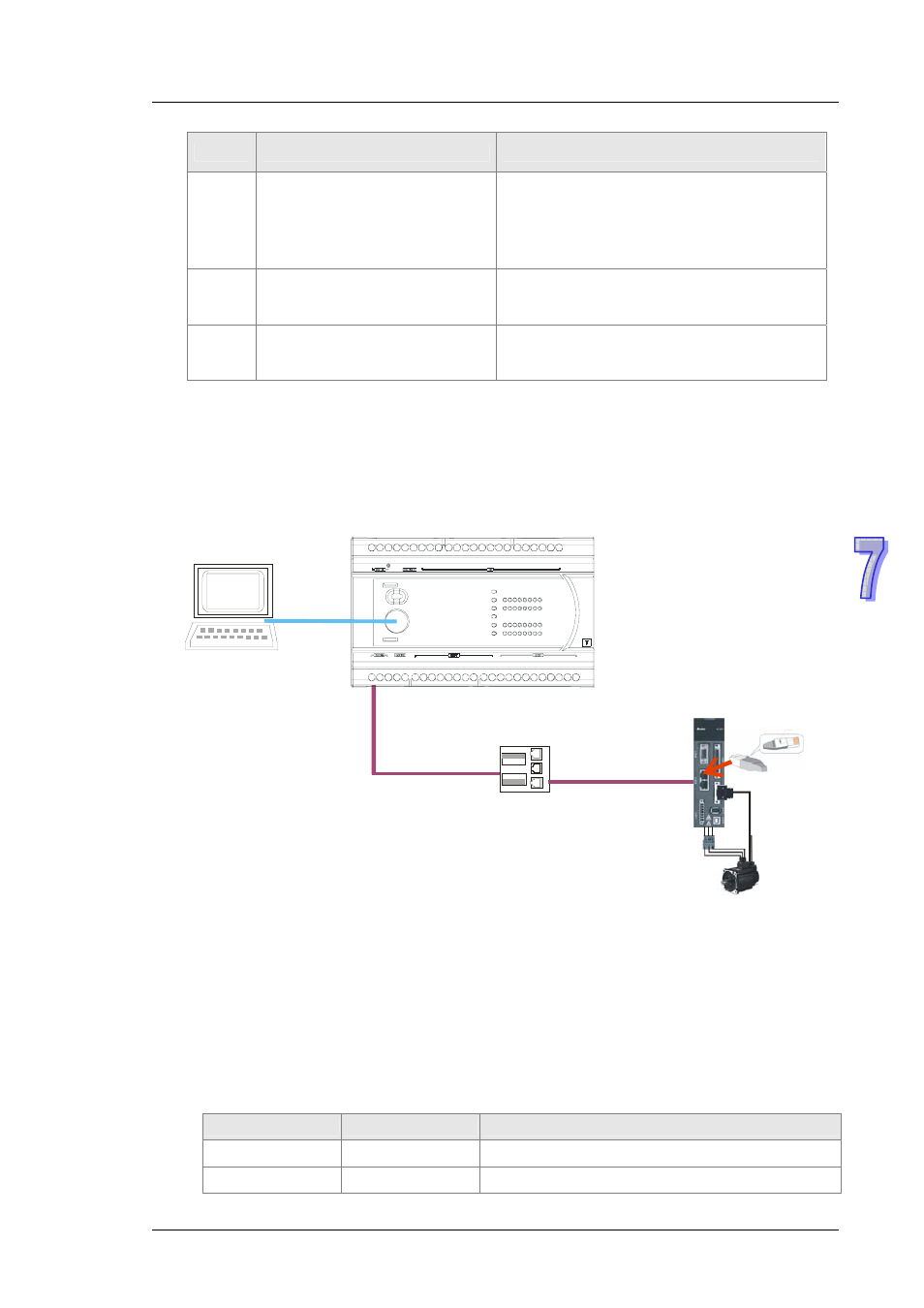
7.6 Application
Example
DVP-ES2-C is used to control Delta A2 servo rotation and monitor the actual rotation speed of
motor in real time. The principle of operation is to map the relevant parameters of servo drive to the
corresponding PDO and read or write the relevant parameters of servo drive through the CAN bus
to accomplish the control requirement.
¾
Hareware Connection:
DVP32ES2-C
PC
TAP-CN03
Y5
UP0
Y0
Y1
Y3
Y2
Y4
Y10
Y7
Y6
UP1
Y12
Y11
Y13
+24V
L
N
NC
X5
X1
S/S
24G
X0
X3
X2
X4
X11
X7
X6
X10
X13
X12
X14 X15
Y16
Y15
Y14
Y17
X17
X16
ZP1
ZP0
CAN+
SG
+
D
D
-
CAN-
ASDA-A2-xxxx-M
CANopen
CANopen
RS-232
Note:
1. We recommend user use the standard communication cable TAP-CB01/TAP-CB02/ TAP-CB10
and connect the terminal resistors such as Delta standard terminal resistor TAP-TR01 to either
terminal of the network when constructing the network.
2. TAP-CN03 is a distribution box and the resistance it has can be effective after its SW1 is
switched to ON. According to actual demand, user could select TAP-CN01/CN02/CN03 for
wiring.
3. M of ASD-A2-xxxx-M refers to the model code and currently only the M-model servo supports
CANopen communication.
¾
Setting Servo Parameters:
Set servo parameters as follows:
Parameter
Setting
Explanation
3-00
02
The Node ID of A2 servo is 2
3-01
400
CAN communication rate is 1Mbps.