Delta DVP-ES2 User Manual
Page 546
D V P - E S 2 / E X 2 / S S 2 / S A2 / S X 2 O p e r a t i o n M a n u a l - P r o g r a m m i n g
3 - 4 3 0
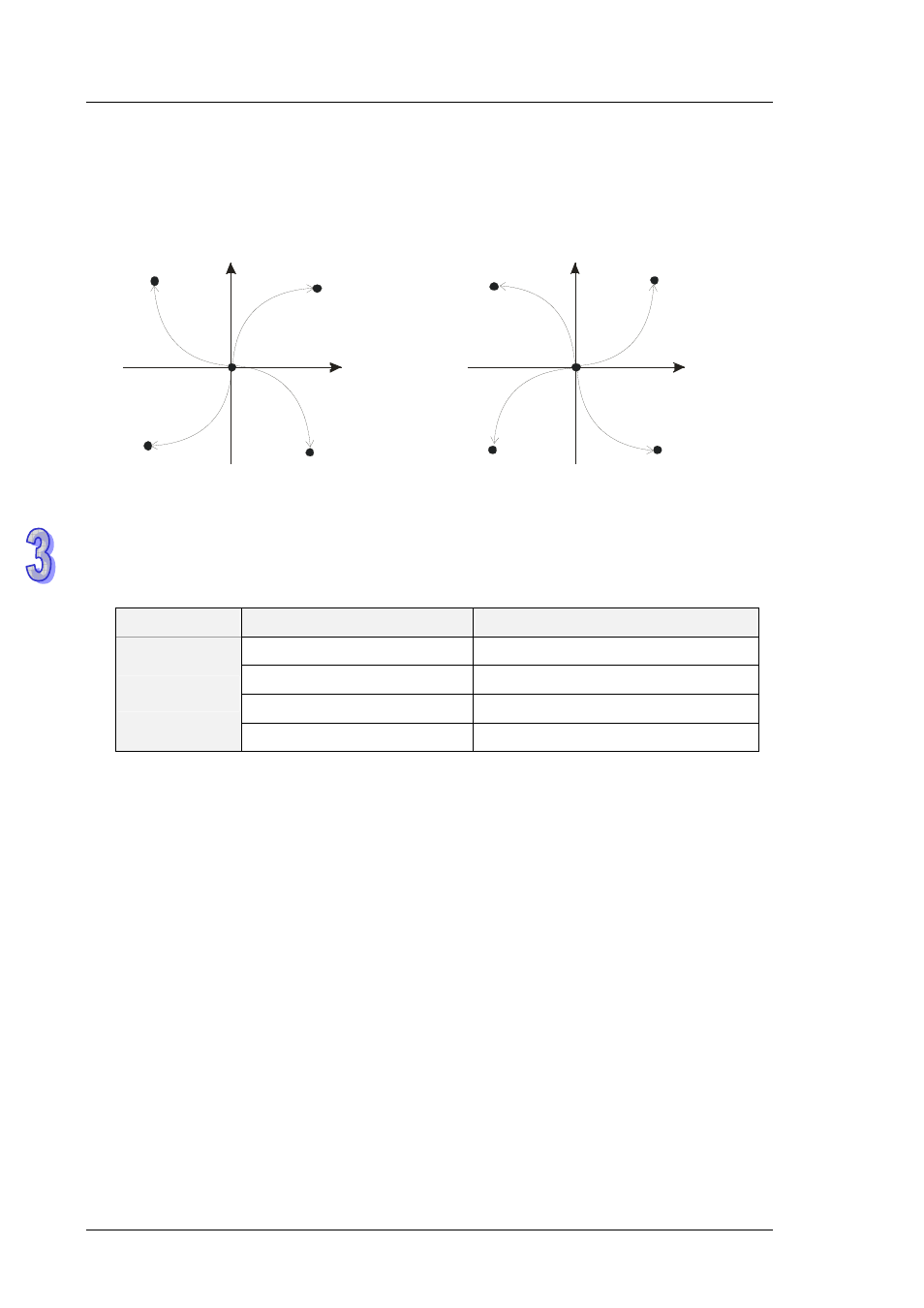
6. Draw four 90
° arcs as the figure below.
When the direction signal is ON, the direction is positive(QI, QIV). When the direction signal is
OFF, the direction is negative(QII, QIII). When S is set as K0, the arcs will be clockwise (see
figure 3). When S is set as K, the arcs will be counterclockwise (see figure 4).
Y
X
Y
X
Quadrant I
Quadrant I I
Quadrant I II
Quadrant I V
Quadrant I
Quadrant I I
Quadrant I II
Quadrant I V
Figure 3
Figure 4
7. The settings of direction and resolution in the lower word of S can only be K0 ~ K1
8. The settings of motion time in the high word of S shall not be faster than the fastest suggested
time. If the motion time is not specified, PLC will use the fastest suggested motion time as the
setting. Refer to the table below.
Segments
Max. target position (pulse)
Fastest suggested set time (unit:100ms)
500 ~ 20,000
2
20,000 ~ 29,999
3
: :
20-segments
resolution
Less than 10,000,000
Less than 200
9. D can designate Y0 only.
Y0 is the pulse output point of X axis;
Y1 is the direction signal output of X axis.(OFF: positive; ON: negative)
Y2 is the pulse output point of Y axis;
Y3 is the direction signal output of Y axis (OFF: positive; ON: negative)
When the pulse output is completed, the direction output signal will not be OFF unless the drive
contact is OFF
10. When the 2-axis interpolation is being executed in 20 segments, it takes approximately 2ms for
the initialization of this instruction. If only 1 axis is specified with pulse output number (with
ramp-up/down section), i.e. another axis is 0, PLC will only execute single-axis positioning
according to the specified motion time. If one of the two axes is specified with the pulse number
less than 500, PLC will execute 2-axis linear interpolation automatically. However, when either
axis is specified for pulse number over 10,000,000, the instruction will not work.
11. If the number of pulses which exceeds the above range is required, the user may adjust the
gear ratio of the servo for obtaining the desired results.
12. Every time when the instruction is executed, only one 90
° arc can be drawn. It is not necessary