Delta DVP-ES2 User Manual
Page 357
3 . I n s t r u c t i o n S e t
3 - 2 4 1
Points to note:
1.
There is no limitation on the times of using this instruction. However, the register No.
designated in S
3
~ S
3
+19
cannot be repeated.
2.
For 16-bit instruction, S
3
occupies 20 registers. In the program example above, the area
designated in S
3
is D100 ~ D119.
3.
Before the execution of PID instruction, users have to transmit the parameters to the
designated register area by MOV instruction. If the designated registers are latched, use
MOVP instruction to transmit all parameters only once
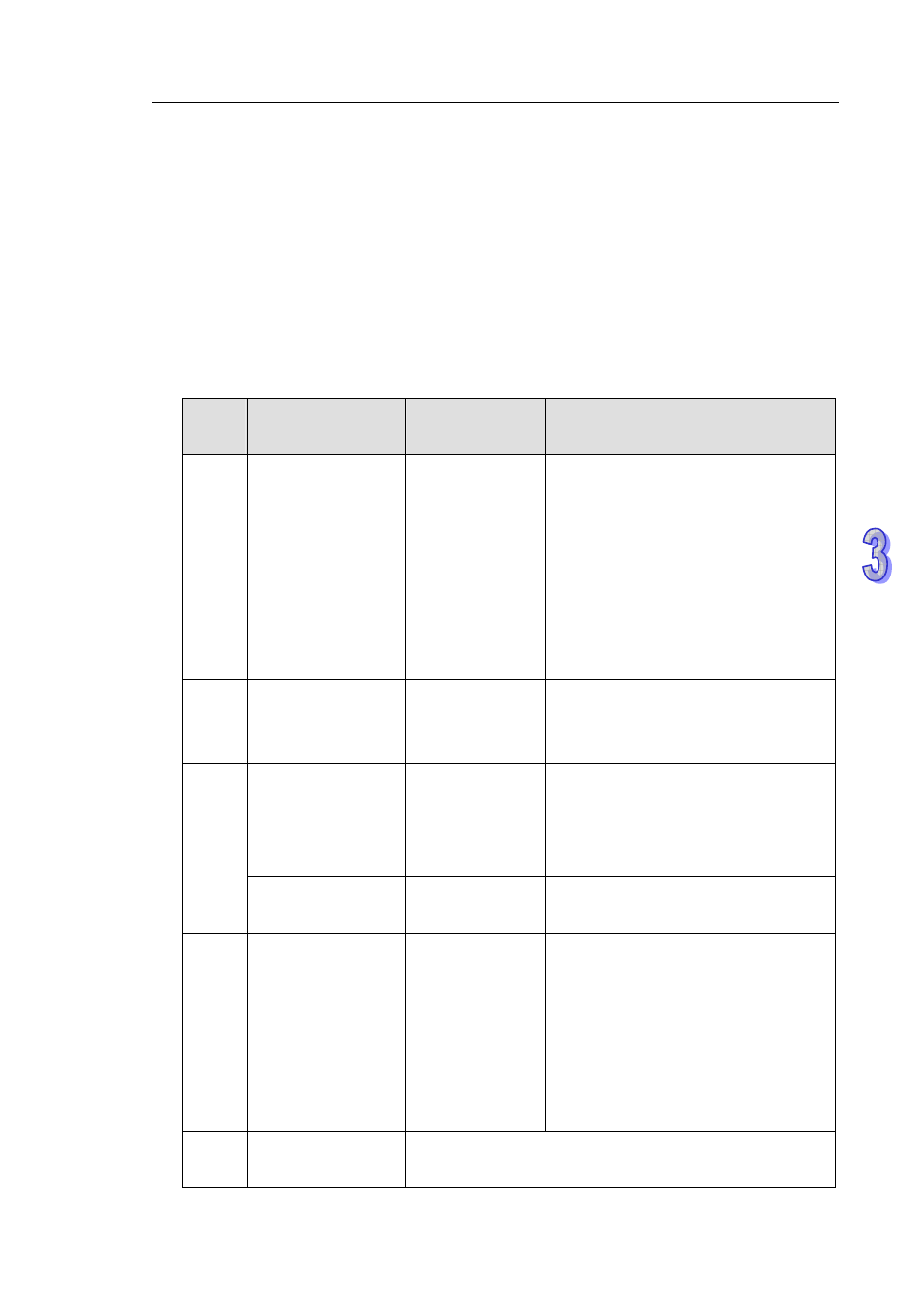
4. Settings
of
S
3
in the 16-bit instruction:
Device
No.
Function
Setup Range
Explanation
S
3
:
Sampling time (T
S
)
1~2,000
(unit: 10ms)
Time interval between PID
calculations and updates of MV. If T
S
= 0, PID instruction will not be
enabled. If T
S
is less than 1 program
scan time, PID instruction sets S
3
as 1
program scan time, i.e. the minimum
T
S
has to be longer than the program
scan time.
S
3
+1:
Propotional gain
(K
P
)
0~30,000(%)
The proportion for
magnifying/minifying the error
between SV and PV.
Integral gain (K
I
) 0~30,000(%)
The proportion for
magnifying/minifying the integral
value (The accumulated error). For
control mode K0~K5.
S
3
+2:
Integral time
constant (T
I
)
0~30,000 (ms)
For control mode K10
Derivative gain (K
D
)
-30,000~30,000
(%)
The proportion for
magnifying/minifying the derivative
value (The rate of change of the
process error). For control mode
K0~K5
S
3
+3
:
Derivative time
constant (T
D
)
-30,000~30,000
(ms)
For control mode K10
S
3
+4:
Control mode
0: Automatic control
1: Forward control (E = SV - PV).