Delta DVP-ES2 User Manual
Page 509
3 . I n s t r u c t i o n S e t
3 - 3 9 3
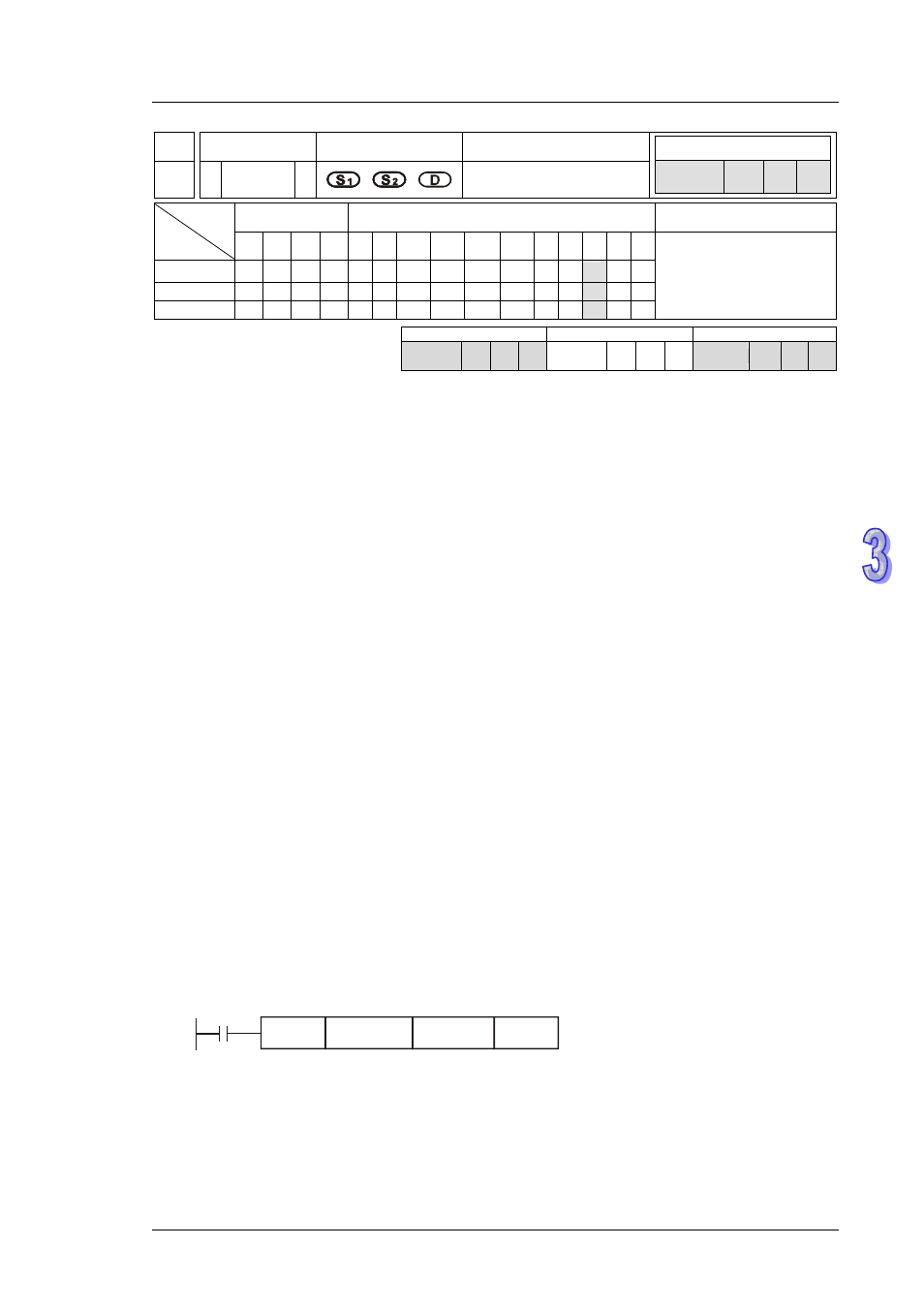
API Mnemonic
Operands
Function
173
D SUBR P
Floating point
subtraction
Controllers
ES2/EX2 SS2 SA2
SE
SX2
Bit Devices
Word devices
Program Steps
Type
OP
X Y
M S K H KnX KnY KnM KnS T C D E F
S
1
*
S
2
*
D
*
DSUBR: 13 steps
PULSE 16-bit 32-bit
ES2/EX2 SS2
SA2
SE
SX2 ES2/EX2 SS2
SA2
SE
SX2 ES2/EX2 SS2
SA2
SE
SX2
Operands:
S
1
: Floating point minuend S
2
: Floating point subtrahend D: Remainder
Explanations:
1. SUBR instruction subtracts S
1
with S
2
and stores the operation result in D.
2. In SUBR instruction, floating point values can be directly entered into S
1
and S
2..
3. In DSUBR instruction, floating point values (e.g. F1.2) can be either entered directly into S
1
and S
2
or stored in data registers for operation.
4. When S
1
and S
2
is specified as data registers, the function of DSUBR instruction is the same
as API 121 ESUB instruction.
5. S
1
and S
2
can designate the same register. In this case, if the instruction is specified as
“continuous execution instruction” (generally DSUBRP instruction) and the drive contact is ON,
the register will be subtracted once in every scan.
6. Flags: M1020 (Zero flag), M1021 (Borrow flag) and M1022 (Carry flag)
If absolute value of the result exceeds max floating point value, carry flag M1022 = ON.
If absolute value of the result is less than min. floating point value, borrow flag M1021 = ON.
If the conversion result is 0, zero flag M1020 = ON
Program example 1:
When X0 = ON, subtract floating point number F1.200E+0 (Input F1.2, and scientific notation
F1.200E+0 will be displayed on ladder diagram. Users can set monitoring data format as float on
the function View) with F2.200E+0 and store the obtained result F-1.000E+0 in register D10 and
D11.
X0
DS UBR
F1.200E+0
D10
F2.200E+0
Program example 2:
When X0 = ON, subtract the floating point value (D1, D0) with (D3, D2) and store the result in (D11,
D10).