Delta DVP-ES2 User Manual
Page 359
3 . I n s t r u c t i o n S e t
3 - 2 4 3
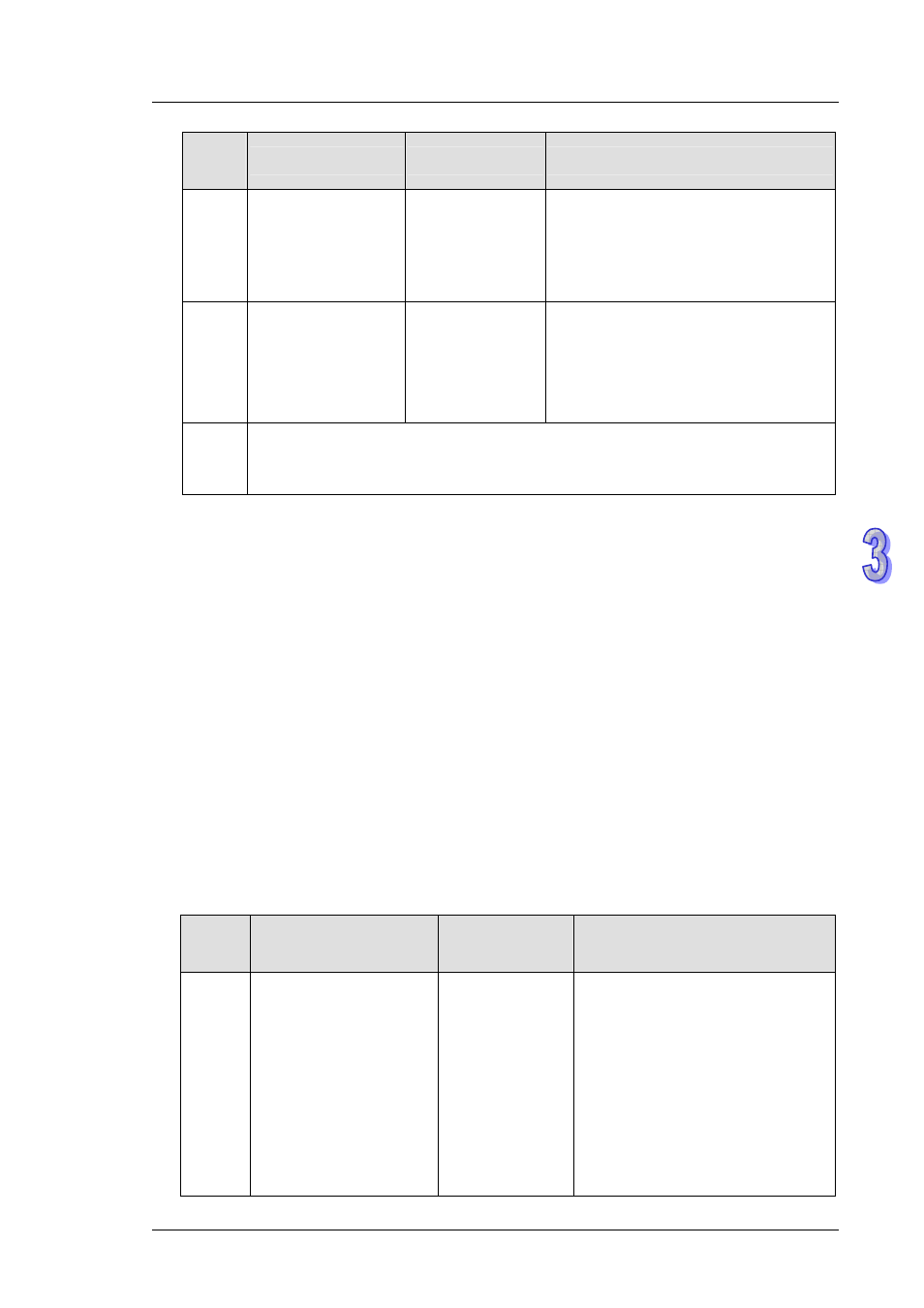
Device
No.
Function
Setup Range
Explanation
S
3
+10,
11:
Accumulated
integral value
Available range
of 32-bit floating
point
The accumulated integral value is
usually for reference. Users can clear
or modify it (in 32-bit floating point)
according to specific needs.
S
3
+12:
The previous PV
-32,768~32,767
The previous PV is usually for
reference. Users can clear or modify it
according to specific needs.
S
3
+13
~
S
3
+19
For system use only..
5. For
S
3
+1~3, when parameter setting exceeds its range, the upper / lower bound will be
selected as the set value.
6.
If the direction setting (Forward / Reverse) exceeds its range, it will be set to 0.
7.
PID instruction can be used in interruption subroutines, step ladders and CJ instruction.
8.
The maximum error of sampling time T
S
= - (1 scan time + 1ms) ~ + (1 scan time). When the
error affects the output, please fix the scan time or execute PID instruction in timer interrupt.
9.
PV of PID instruction has to be stable before PID operation executes. If users need to take the
value input from AIO modules for PID operation, care should be taken on the A/D conversion
time of these modules
10. For 32-bit instruction, S
3
occupies 21 registers. In the program example above, the area
designated in S
3
will be D100 ~ D120. Before the execution of PID instruction, users have to
transmit the parameters to the designated register area by MOV instruction. If the designated
registers are latched, use MOVP instruction to transmit all parameters only once.
11. Parameter table of 32-bit S
3
:
Device
No.
Function
Set-point range
Explanation
S
3
:
Sampling time (T
S
)
1~2,000
(unit: 10ms)
Time interval between PID
calculations and updates of MV. If
T
S
= 0, PID instruction will not be
enabled. If T
S
is less than 1
program scan time, PID instruction
sets S
3
as 1 program scan time,
i.e. the minimum T
S
has to be
longer than the program scan time.