Control requirement, Hardware connection – Delta DVP-ES2 User Manual
Page 677
7 C AN o p e n F u n c t i o n a n d O p e r a t i o n
7 - 2 1
Emergency response data
Response message
PLC device
High byte
Low byte
D6000 ReqID=01
Status
code
=01
D6001
Reserved =0
Size =2A (Hex)
D6002
Message
header
Type =04
Node ID =02
D6003
Total number of data =1
Number of data stored =1
D6004
Datum 1=54
Datum 0=42
D6005
Datum 3=15
Datum 2=20
D6006
Datum 5=0
Datum 4=0
D6007
Datum 7=0
Datum 6=0
D6004
Datum 1=54
Datum 0=43
D6005
Datum 3=14
Datum 2=20
D6006
Datum 5=0
Datum 4=0
D6007
Message
data
Datum 7=0
Datum 6=0
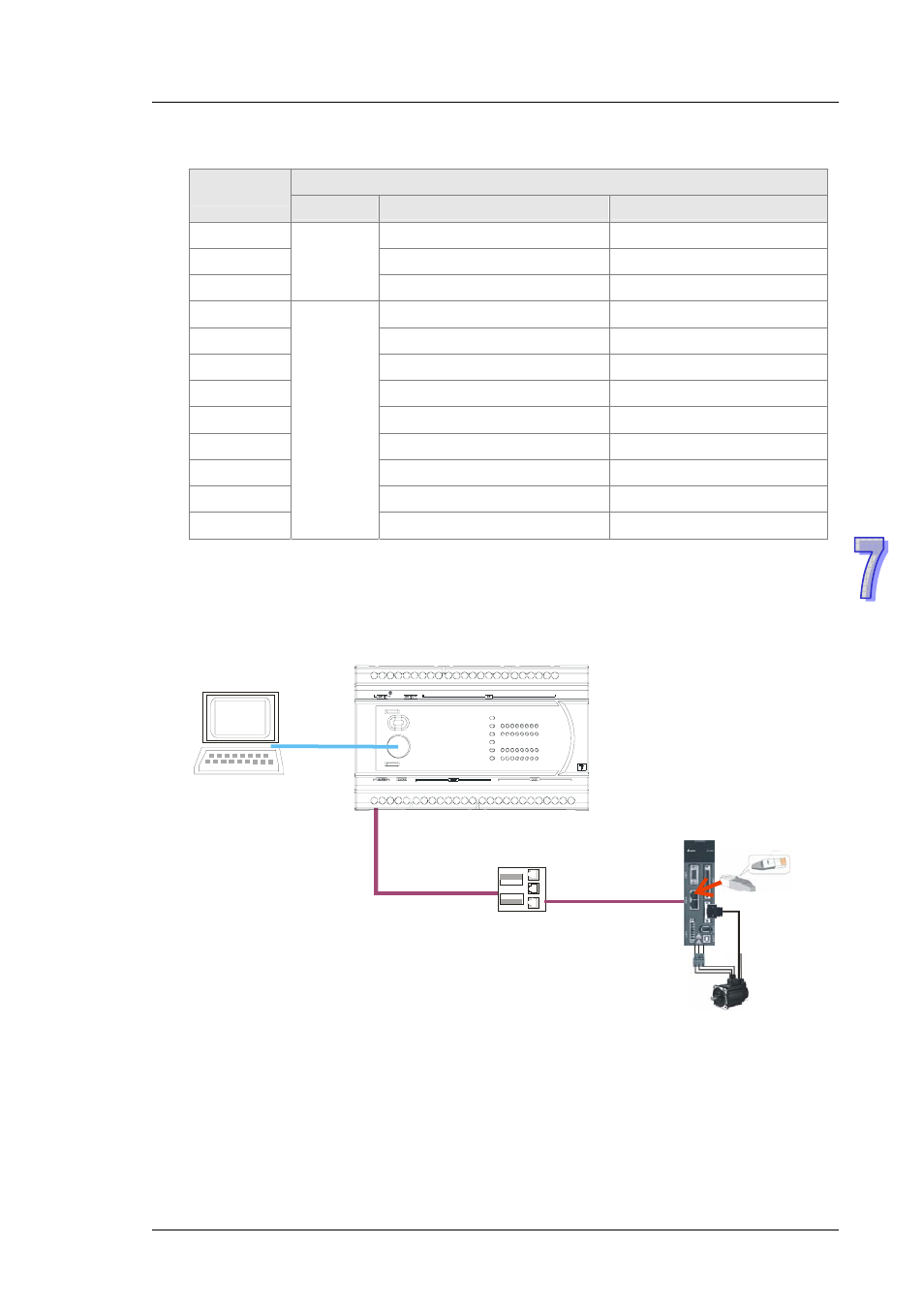
7.4.4 Example on Sending SDO through the Ladder Diagram
¾
Control Requirement:
Read the value of P0-09 of servo in cycle through SDO.
¾
Hardware Connection:
DVP32ES2-C
PC
TAP-CN03
Y5
UP0
Y0
Y1
Y3
Y2
Y4
Y10
Y7
Y6
UP1
Y12
Y11
Y13
+24V
L
N
NC
X5
X1
S/S
24G
X0
X3
X2
X4
X11
X7
X6
X10
X13
X12
X14 X15
Y16
Y15
Y14
Y17
X17
X16
ZP1
ZP0
CAN+
SG
+
D
D
-
CAN-
ASDA-A2-xxxx-M
CANopen
CANopen
RS-232
¾
The Corresponding Relation between Slave Parameter and Index/Subindex
The index_subindex corresponding to P0-09 of servo is 2009_0. On the interface of the
network configuration software, right click the servo icon; select “Parameter Edit” and then the
following dialog box will appear. You can see the index_subindex corresponding to the servo
parameter in the dialog box.
For more details on how to operate the network configuration interface, please refer to section
11.1.1 of the help file of CANopen Builder software.