Delta DVP-ES2 User Manual
Page 477
3 . I n s t r u c t i o n S e t
3 - 3 6 1
6.
Please use NO contact as the drive contact of DABSR instruction. If the drive contact is OFF
during the execution of DABSR, the instruction will be stopped and errors will occur on read
data.
7.
If the drive contact of DABSR instruction turns OFF after the instruction is completed, the
servo ON (SON) signal connected to D
1
will also turn OFF and the operation will be disabled.
8.
Flags: For the descriptions of M1010, M1029, M1102, M1103, M1334, M1335, M1336, M1337,
M1346, please refer to Points to Note.
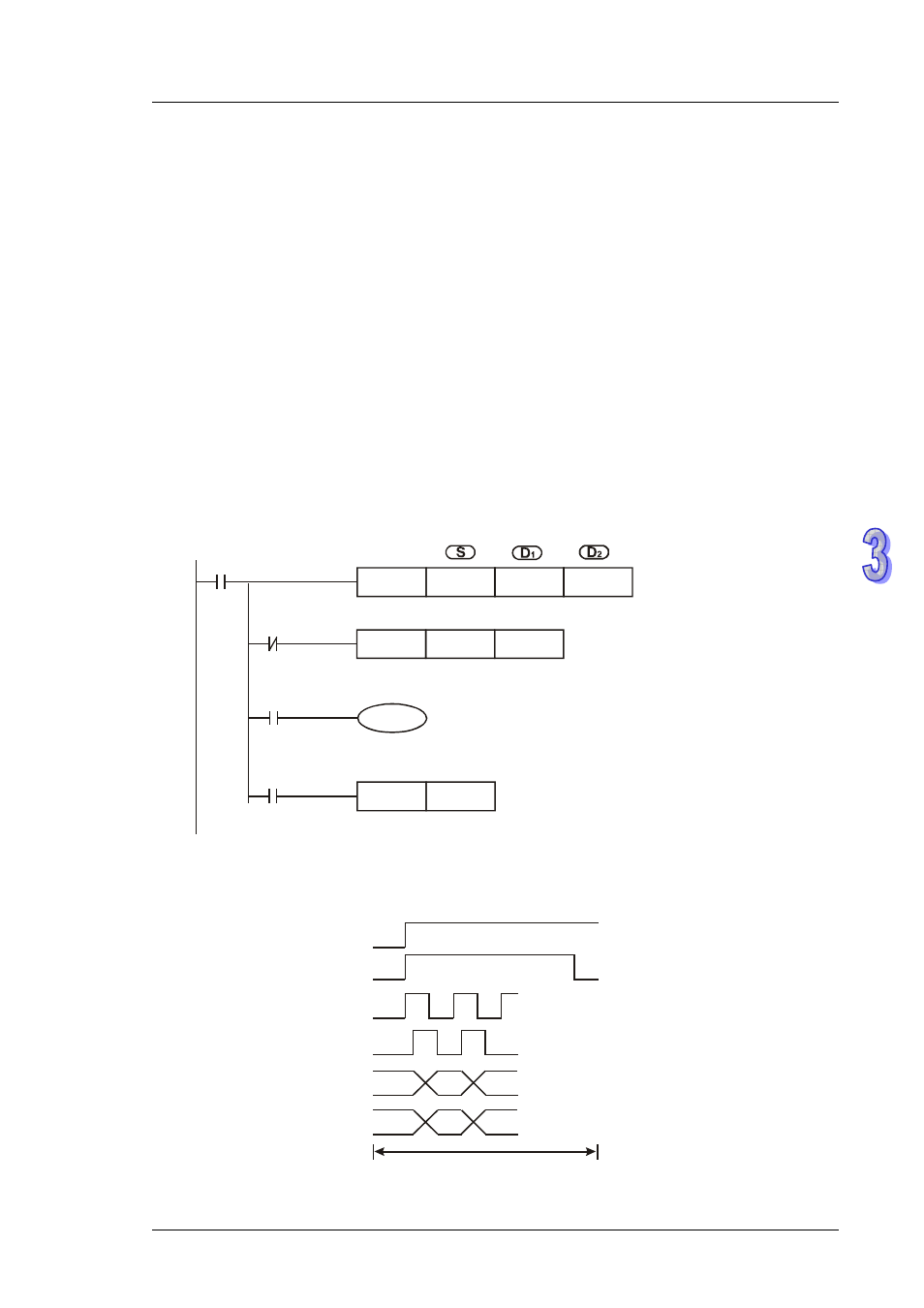
Program Example:
1.
When X7 = ON, the 32-bit absolute position data read from servo will be stored in the registers
storing present value of CH0 pulse output (D1348, D1349). At the same time, timer T10 is
enabled and starts to count for 5 seconds. If the instruction is not completed within 5 seconds,
M10 will be ON, indicating operation errors.
2.
When enabling the connection to the system, please synchronize the power input of DVP-PLC
and SERVO AMP or activate the power of SERVO AMP earlier than DVP-PLC.
X7
DABSR
X0
Y4
D1348
TMR
T0
K50
M11
M10
T0
SET
M11
M1029
ABSR
completed
Execution
completed flag
ABSR timeout
ABS absolute position
data read is abnormal
ABS absolute position
data read is completed
Points to note:
3.
Timing diagram of the operation of DABSR instruction:
SON
ABSM
TLC
ABSR
ZSP
D01
AMP output
Servo ON
ABS(bit 1)
ABS(bit 0)
ABS request
Transmission ready
ABS data
mode
transmission
Current position data 32-bit
+ check data 6-bit
Controller output
AMP output
AMP output