Delta DVP-ES2 User Manual
Page 476
D V P - E S 2 / E X 2 / S S 2 / S A2 / S X 2 / S E O p e r a t i o n M a n u a l - P r o g r a m m i n g
3 - 3 6 0
API Mnemonic
Operands
Function
155
D ABSR
Absolute position read
Controllers
ES2/EX2 SS2 SA2
SE
SX2
Bit Devices
Word devices
Program Steps
Type
OP
X Y M S
K H
KnX
KnY KnM KnS T C D E F
S
*
*
*
*
D
1
*
*
*
D
2
*
*
*
*
*
*
*
DABSR: 13 steps
PULSE 16-bit 32-bit
ES2/EX2 SS2
SA2
SE
SX2 ES2/EX2 SS2
SA2
SE
SX2 ES2/EX2 SS2
SA2
SE
SX2
Operands:
S: Input signal from servo (occupies 3 consecutive devices) D
1
: Control signal for controlling
servo (occupies 3 consecutive devices) D
2
: Absolute position data (32-bit) read from servo
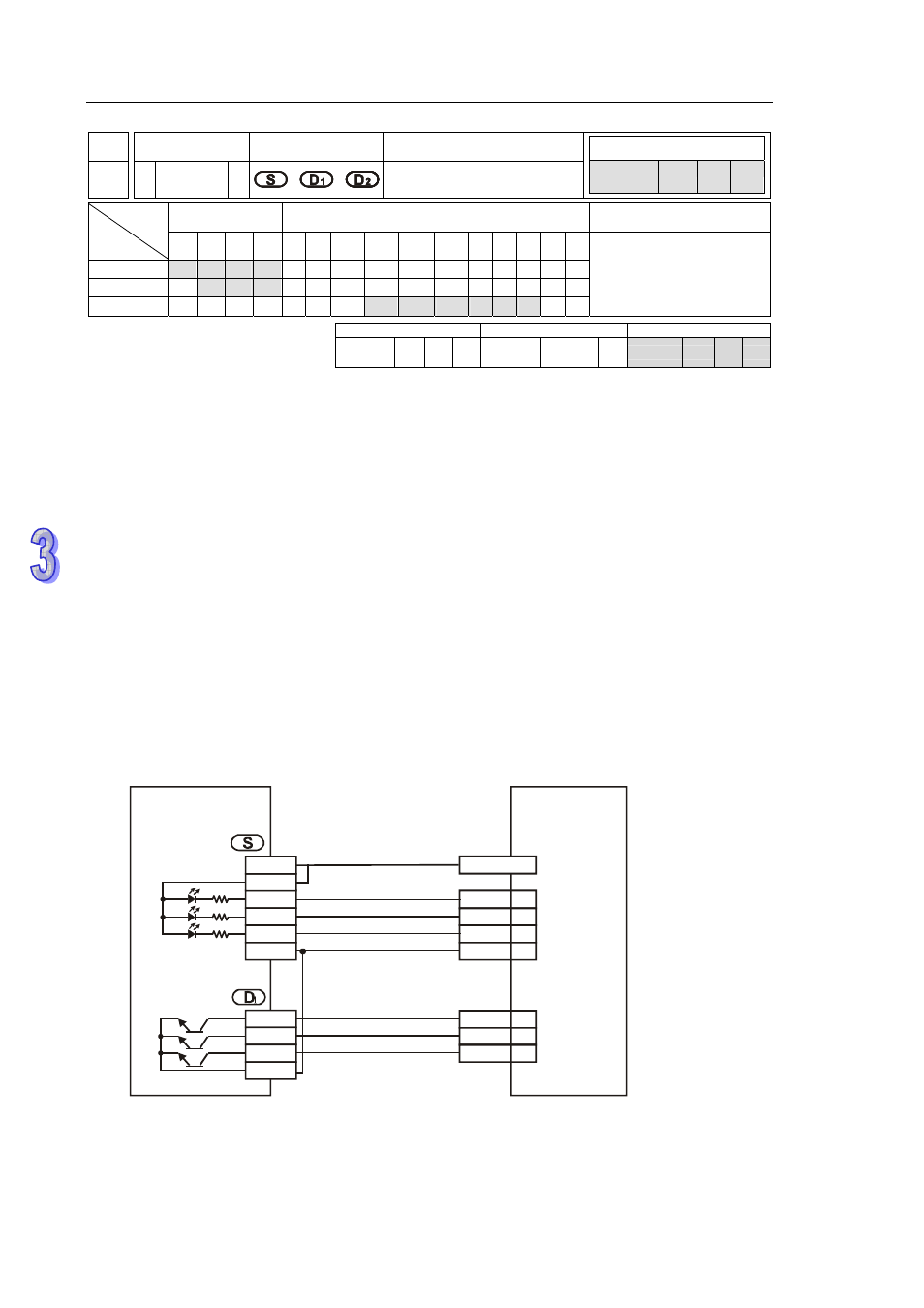
Explanations:
1.
This instruction reads the absolute position (ABS) of servo drive with absolute position check
function, e.g. MITSUBISHI MR-J2.
2.
Only 32-bit instruction is applicable for ABSR instruction (DABSR) and it can only be used
ONCE in the program.
3.
S: input signal from servo. 3 consecutive devices S, S +1, S +2 are occupied. S and S +1 are
connected to the ABS (bit0, bit1) of servo for data transmitting. S +2 is connected to servo for
indicating transmission data being prepared.
4.
D
1
: control signal for controlling servo. 3 consecutive devices D
1
, D
1
+1, D
1
+2 are occupied. D
1
is connected to servo ON (SON) of servo, D
1
+1 is connected to ABS transmission mode of
servo and D
1
+2 is connected to ABS request.
PLC-DVP32ES200T
ABS(bit 0)
ABS(bit 1)
Servo ON
SERVO AMP
MR-J2-A
CN1B
D01
4
19
10
6
ZSP
TLC
SG
5
8
9
SON
ABSM
ABSR
X0
X1
X2
24G
S/S
+24V
Y0
Y1
Y2
C
VDD 3
Transmission ready
ABS request
ABS transmission mode
5.
D
2
: Absolute position data (32-bit) read from servo. 2 consecutive devices D
2
, D
2
+1 are
occupied. D
2
is low word and D
2
+1 is high word. When DABSR instruction is completed,
M1029 will be ON. M1029 has to be reset by users.