Rockwell Automation 193 Drives and Motion Accelerator Toolkit Quick Start User Manual
Page 33
Rockwell Automation Publication IASIMP-QS019E-EN-P - August 2013
33
Initial System Configuration Using the DMAT Wizard
Chapter 1
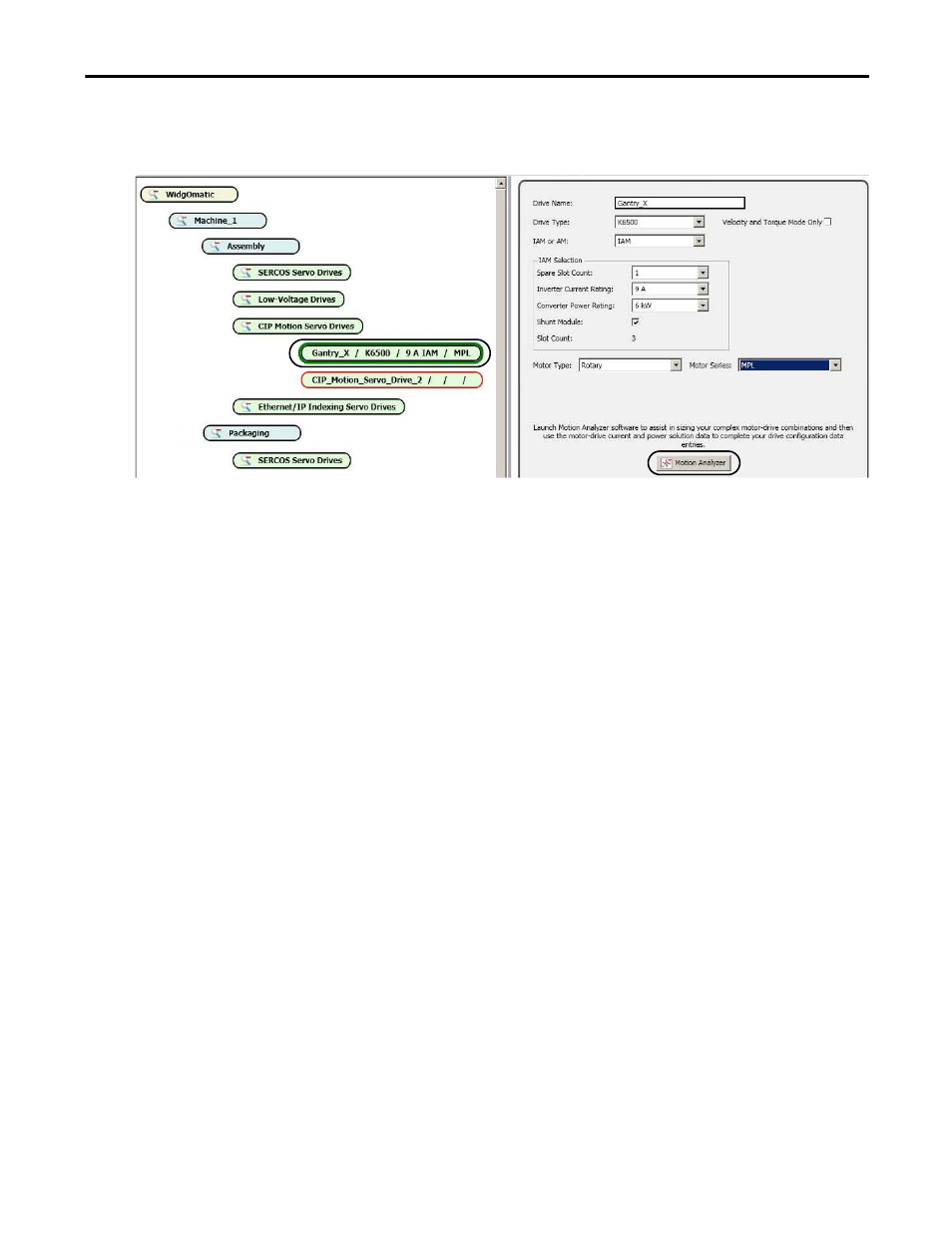
4.
For multi-axis servo drive types, select an integrated axis module (IAM) for the first drive of its type.
For the WidgOmatic example, the Gantry_X drive is configured as an IAM module.
a. From the Spare Slot Count pull-down menu, choose the number of spare slots available on the Bulletin
2094 power rail.
b. From the Inverter Current Rating pull-down menu, choose the inverter current rating for your drive.
c. From the Converter Power Rating pull-down menu, choose the converter power rating for your drive.
d. Check Shunt Module if the Bulletin 2094 (rail-mounted) shunt module is included on your power rail.
e. Note the Slot Count value.
This is the total number of slots used on the 2094 power rail. You are prompted if the slot count exceeds
the power rail capacity.
f. Check Velocity and Torque Mode Only if you would like the servo drive axis to be configured for
Velocity mode.
To select Torque mode, use the Axis Properties configuration in the Logix Designer application. If this
box is clear, the axis configuration defaults to Position mode.
g. From the pull-down menus, choose the Motor Type and Motor Series being paired with the drive.
For the WidgOmatic example, the Gantry_X drive is configured for the Rotary Motor Type and the
MPL Motor Series.
- 150 Drives and Motion Accelerator Toolkit Quick Start 21G Drives and Motion Accelerator Toolkit Quick Start 20G Drives and Motion Accelerator Toolkit Quick Start 20F Drives and Motion Accelerator Toolkit Quick Start 2097 Drives and Motion Accelerator Toolkit Quick Start 2094 Drives and Motion Accelerator Toolkit Quick Start