Rockwell Automation 193 Drives and Motion Accelerator Toolkit Quick Start User Manual
Page 209
Rockwell Automation Publication IASIMP-QS019E-EN-P - August 2013
209
Logic Program Overview
Appendix A
You can fully customize the state machine, letting you change the relationship between states and the state
names, and add or remove states if needed. Refer to Appendix B on
for information on how to
customize the state machine.
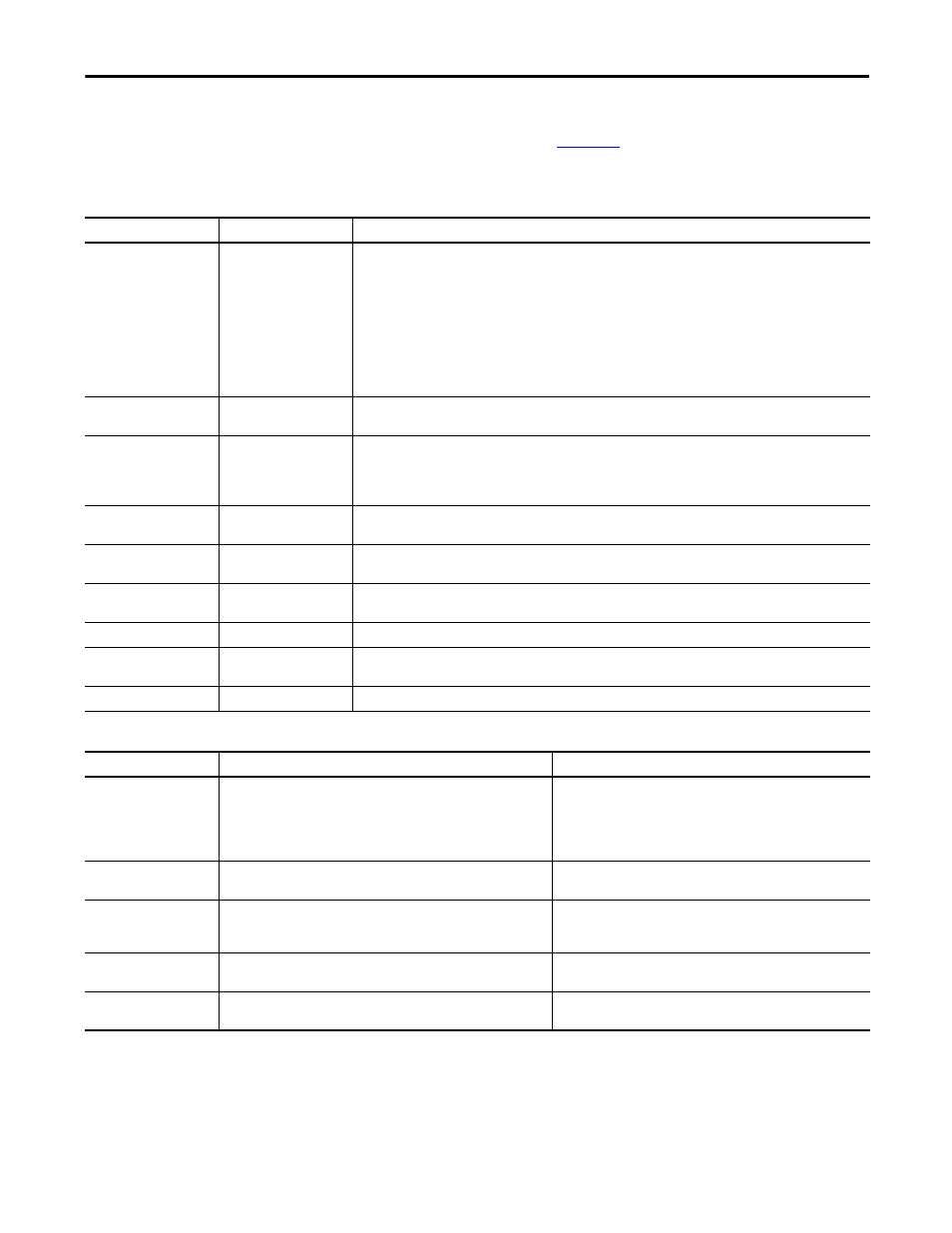
Default Machine States
Default Machine Commands
Machine State
State Type
Description
ABORTING
Transitional
Broadcasts the ABORT command until confirmation that all of the application and device modules are aborted. The
ABORTING state is triggered based on feedback from the modules.
Default ABORT conditions that place the machine in the ABORTTING state include:
• Power-up detected (for example, controller first scan)
• Modules not ready while the machine is in STARTING and/or RUNNING states
• Modules detected a fault condition
• Modules failed to RESET
• Modules failed to START
• Modules failed to STOP
• Modules failed to CLEAR
ABORTED
Permanent
All application and device modules are aborted (for example, stopped and disabled). Typically, this state indicates a
fault condition.
CLEARING
Transitional
Broadcasts the CLEAR command until confirmation that all of the application and device modules are ok (for example,
all active drive and/or modules have been cleared) within the allotted time. Otherwise, an ABORT condition is
generated.
Once all of the modules are ok, the machine is placed into the STOPPED state.
RESETTING
Transitional
Broadcasts the RESET command until confirmation that all of the application and device modules are reset within the
allotted time. Otherwise, an ABORT condition is generated.
IDLE
Permanent
All application and device modules are reset or ready to run (for example, enabled or homed). Typically, this state that
the machine is ready to run and awaits a START command.
STARTING
Transitional
Broadcasts the RESET command until confirmation that all of the application modules are running within the allotted
time. Otherwise, an ABORT condition is generated.
RUNNING
Permanent
All application modules are running.
STOPPING
Transitional
Broadcasts the STOP command until confirmation that all of the application modules are stopped within the allotted
time. Otherwise, an ABORT condition is generated.
STOPPED
Permanent
All application modules are stopped and all modules (application and/or device) are ready.
Machine Command
Application Module Response
Device Module Response
ABORT
Halts the application RUN sequence (if active) and initiates the STOP
sequence. The STOP sequence attempts to stop and disable all active drives.
Halts the device module RESET sequence (if active) and initiates the
device module ABORT sequence. The ABORT sequence makes sure the
drives contained within the module are stopped and disabled.
The ABORT sequence can also be used to make sure other devices are
placed into a desired state.
CLEAR
Attempts to clear any active faults that exist in the modules.
Attempts to clear any active faults that exist in either the module and/or
drive.
RESET
Initiates the application RESET sequence, which prepares the application
and/or devices to run. Use this for the coordinated reset of multiple
modules.
Initiates the device module RESET sequence, which prepares the device
module to run.
START
Initiates the application RUN sequence. Customize the RUN sequence to fit
the needs of your application.
Ignored
(1)
(1) By default, these commands are ignored by the module. However, you can change the relationship of each module to best fit the needs of the application.
STOP
Halts the application RUN sequence (if active) and initiates the STOP
sequence. The STOP sequence attempts to stop and disable all active drives.
Halts the device module RESET sequence.
- 150 Drives and Motion Accelerator Toolkit Quick Start 21G Drives and Motion Accelerator Toolkit Quick Start 20G Drives and Motion Accelerator Toolkit Quick Start 20F Drives and Motion Accelerator Toolkit Quick Start 2097 Drives and Motion Accelerator Toolkit Quick Start 2094 Drives and Motion Accelerator Toolkit Quick Start