Configure kinetix 300 drive parameters – Rockwell Automation 193 Drives and Motion Accelerator Toolkit Quick Start User Manual
Page 315
Rockwell Automation Publication IASIMP-QS019E-EN-P - August 2013
315
Controller, Network, and Device Configuration Without the DMAT Wizard
Appendix G
2.
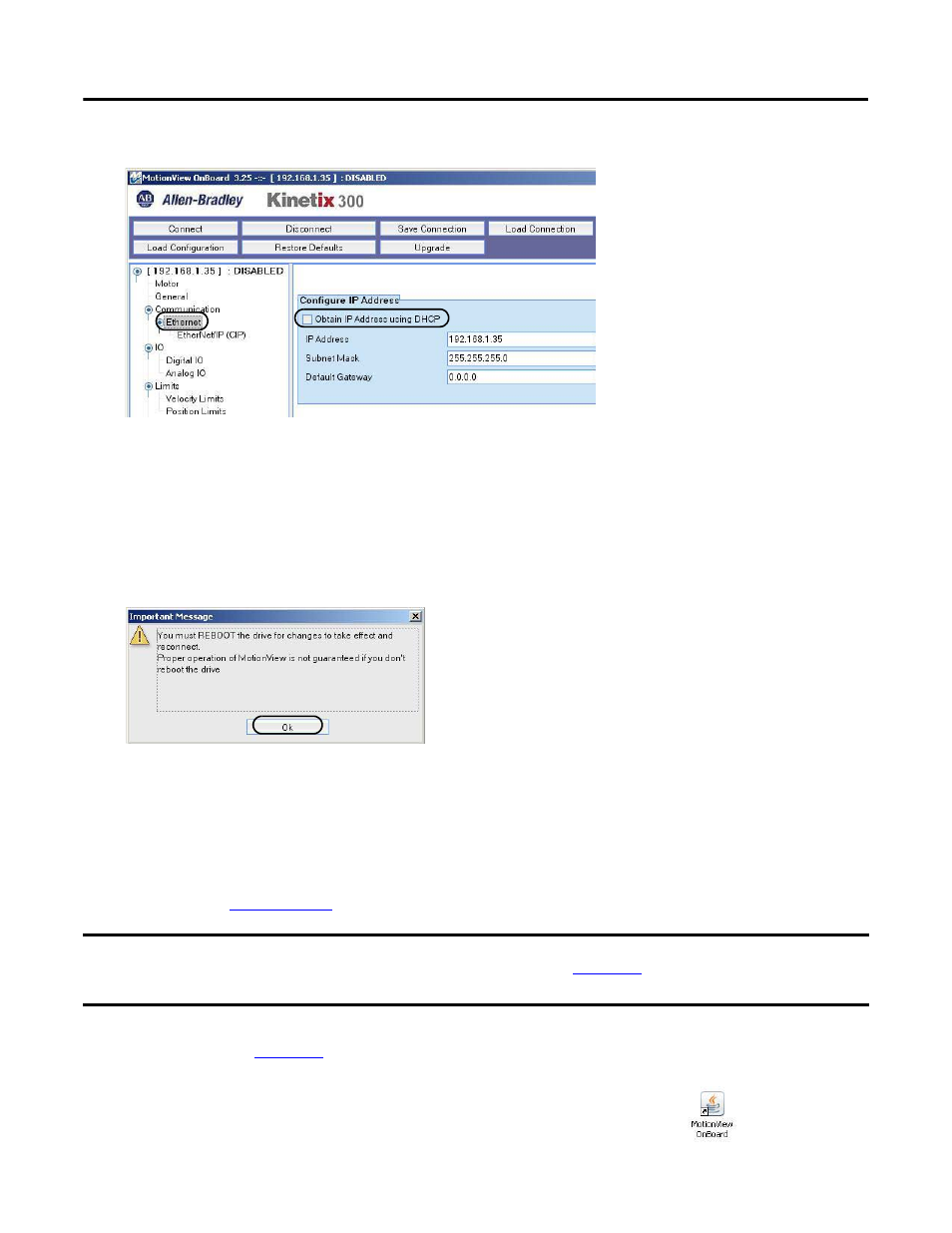
From the drive organizer, select Communication>Ethernet.
3.
Uncheck Obtain IP Address using DHCP.
4.
Enter the IP Address.
For the Widg-O-matic application example, the IP address is 192.168.1.35.
5.
Enter Subnet Mask 255.255.255.0
After changing these parameters a warning message pop-up asks you to cycle power.
6.
Click Ok.
Configure Kinetix 300 Drive Parameters
The Kinetix 300 drive parameters are configured using MotionView Onboard software over the EtherNet/IP
network. For more information on drive parameters, refer to the Kinetix 300 EtherNet/IP Indexing User
Manual, publication
1.
Open the MotionView software. If the MotionView Java application has been
downloaded, double-click the MotionView Onboard icon.
IMPORTANT
If your application does not use the Kinetix 300 safety circuit, make sure that the safe torque-off circuit is bypassed. Refer to the
Kinetix 300 EtherNet/IP Indexing Servo Drives User Manual, publication
or more information on wiring the safety
circuit.
TIP
By default, the Kinetix 300 drive uses a hardware enable signal. Refer to the Kinetix 300 EtherNet/IP Indexing User Manual,
publication
able circuit wiring examples.
- 150 Drives and Motion Accelerator Toolkit Quick Start 21G Drives and Motion Accelerator Toolkit Quick Start 20G Drives and Motion Accelerator Toolkit Quick Start 20F Drives and Motion Accelerator Toolkit Quick Start 2097 Drives and Motion Accelerator Toolkit Quick Start 2094 Drives and Motion Accelerator Toolkit Quick Start