H2: multi-function digital outputs – Yaskawa AC Drive-P1000 Industrial Fan User Manual
Page 214
Setting AD: Select PI2 Parameters
Uses the secondary PI controller Proportional and Integral adjustments (S3-06 and S3-07) instead of the primary PI controller
Proportional and Integral adjustments (b5-02 and b5-03). Only valid when S3-01 = 0 (secondary PI controller disabled).
Note:
This multi-function input has no effect on the secondary PI controller. It is only used for the primary PI controller (b5-oo).
Emergency Override Function
The Emergency Override function is activated by closing the digital input programmed for Emergency Override Forward Run
(H1-oo = AF) or Emergency Override Reverse Run (H1-oo = B0).
If H1-oo = 6A (Drive Enable) is programmed, it must be opened to disable the drive for Emergency Override to take effect.
Closing both Emergency Override digital inputs at the same time will trigger an External Fault (EF) error.
When the drive is in Emergency Override, the frequency reference source is dependent on parameter S6-02, Emergency
Override Reference Selection. When S6-02 is set to 0 (Use S6-01 Reference), the drive will run at the S6-01 setting. When
S6-02 is set to 1 (Use Frequency Ref), the drive will use the currently selected frequency reference (based on b1-01 and
LOCAL/REMOTE) as the run speed.
An alarm will flash during Emergency Override indicating that the function is active and the direction the drive is commanded
to run.
Resettable faults occurring when Emergency Override is activated will be cleared.
The drive will perform unlimited speed search retries during Emergency Override.
When Emergency Stop is active and Emergency Override is activated, the drive will run in Emergency Override mode.
The CALL (Serial Communication Error) mechanism is deactivated when Emergency Override is activated.
The Emergency Override function has priority over the PID Sleep feature (b5-15/b5-16).
Setting AF: Emergency Override Forward Run
Enables Emergency Override Forward Run (Enabled when S6-01 = 1).
Setting B0: Emergency Override Reverse Run
Enables Emergency Override Reverse Run (Enabled when S6-01 = 1).
u
H2: Multi-Function Digital Outputs
n
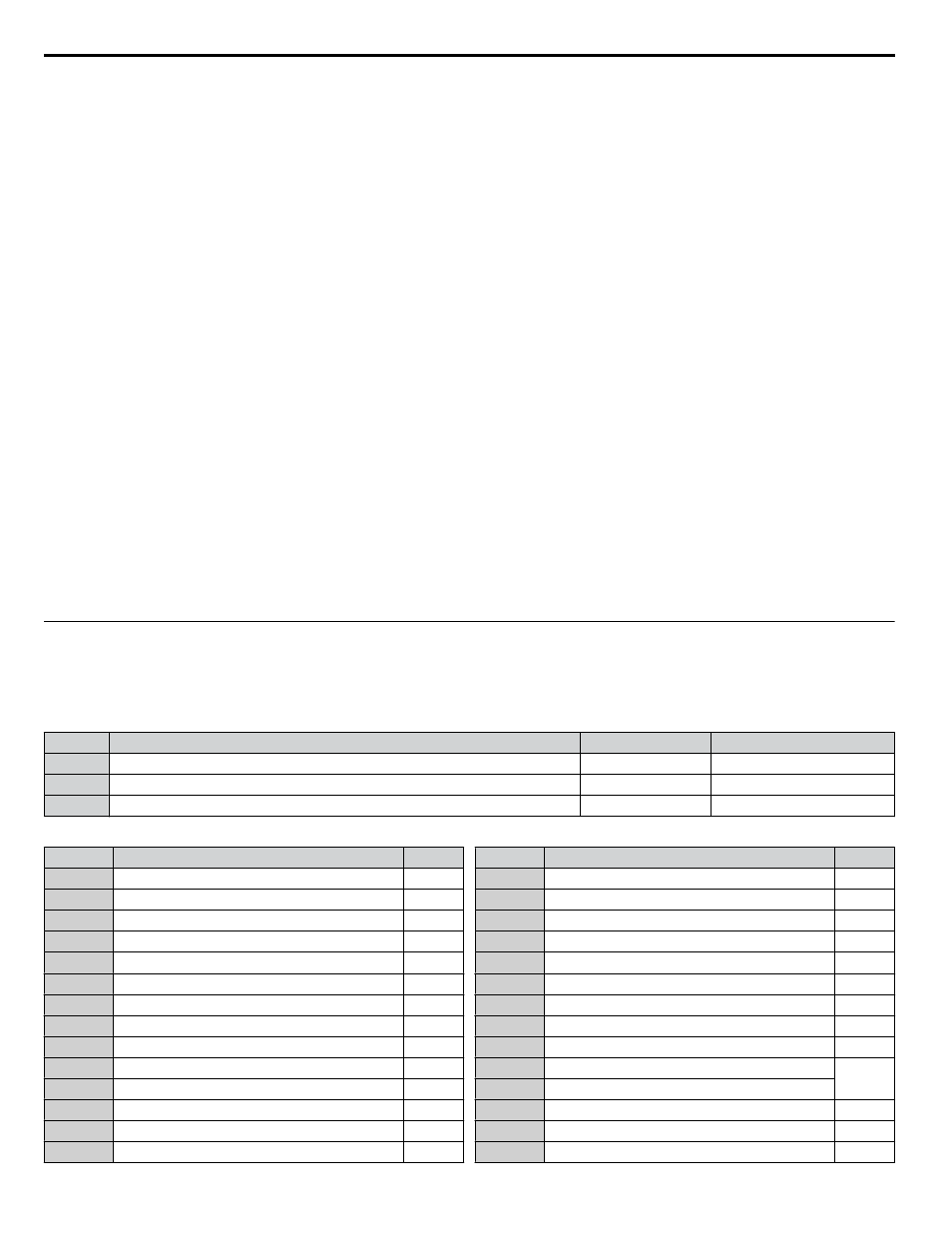
H2-01 to H2-03: Terminal M1-M2, M3-M4, and MD-ME-MF Function Selection
The drive has three multi-function output terminals.
lists the functions available for theses terminals using H2-01,
H2-02, and H2-03.
No.
Parameter Name
Setting Range
Default
H2-01
Terminal M1-M2 Function Selection (relay)
0 to 192
0: During Run
H2-02
Terminal M3-M4 Function Selection (relay)
0 to 192
1: Zero Speed
H2-03
Terminal MD-ME-MF Function Selection (relay)
0 to 192
2: Speed agree 1
Table 5.33 Multi-Function Digital Output Terminal Settings
Setting
Function
0
During Run
1
Zero Speed
2
Speed Agree 1
3
User-Set Speed Agree 1
4
Frequency Detection 1
5
Frequency Detection 2
6
Drive Ready
7
DC Bus Undervoltage
8
During Baseblock (N.O.)
9
Frequency Reference Source
A
Run Command Source
B
Torque Detection 1 (N.O.)
C
Frequency Reference Loss
D
Braking Resistor Fault
Setting
Function
E
Fault
F
Through Mode
10
Minor Fault
11
Fault Reset Command Active
12
Timer Output
13
Speed Agree 2
14
User-Set Speed Agree 2
15
Frequency Detection 3
16
Frequency Detection 4
17
Torque Detection 1 (N.C.)
18
Torque Detection 2 (N.O.)
19
Torque Detection 2 (N.C.)
1A
During Reverse
1B
During Baseblock (N.C.)
5.7 H: Terminal Functions
214
YASKAWA SIEP YAIP1U 01B AC Drive - P1000 Technical Manual