Yaskawa AC Drive-P1000 Industrial Fan User Manual
Page 210
Setting 20 to 2F: External Fault
The External fault command stops the drive when problems occur with external devices.
To use the External fault command, set one of the multi-function digital inputs to a value between 20 and 2F. The digital
operator will display EFo where o is the number of the terminal to which the external fault signal is assigned.
For example, if an external fault signal is input to terminal S3, “EF3” will be displayed.
Select the value to be set in H1-oo from a combination of any of the following three conditions:
• Signal input level from peripheral devices (N.O., N.C.)
• External fault detection method
• Operation after external fault detection
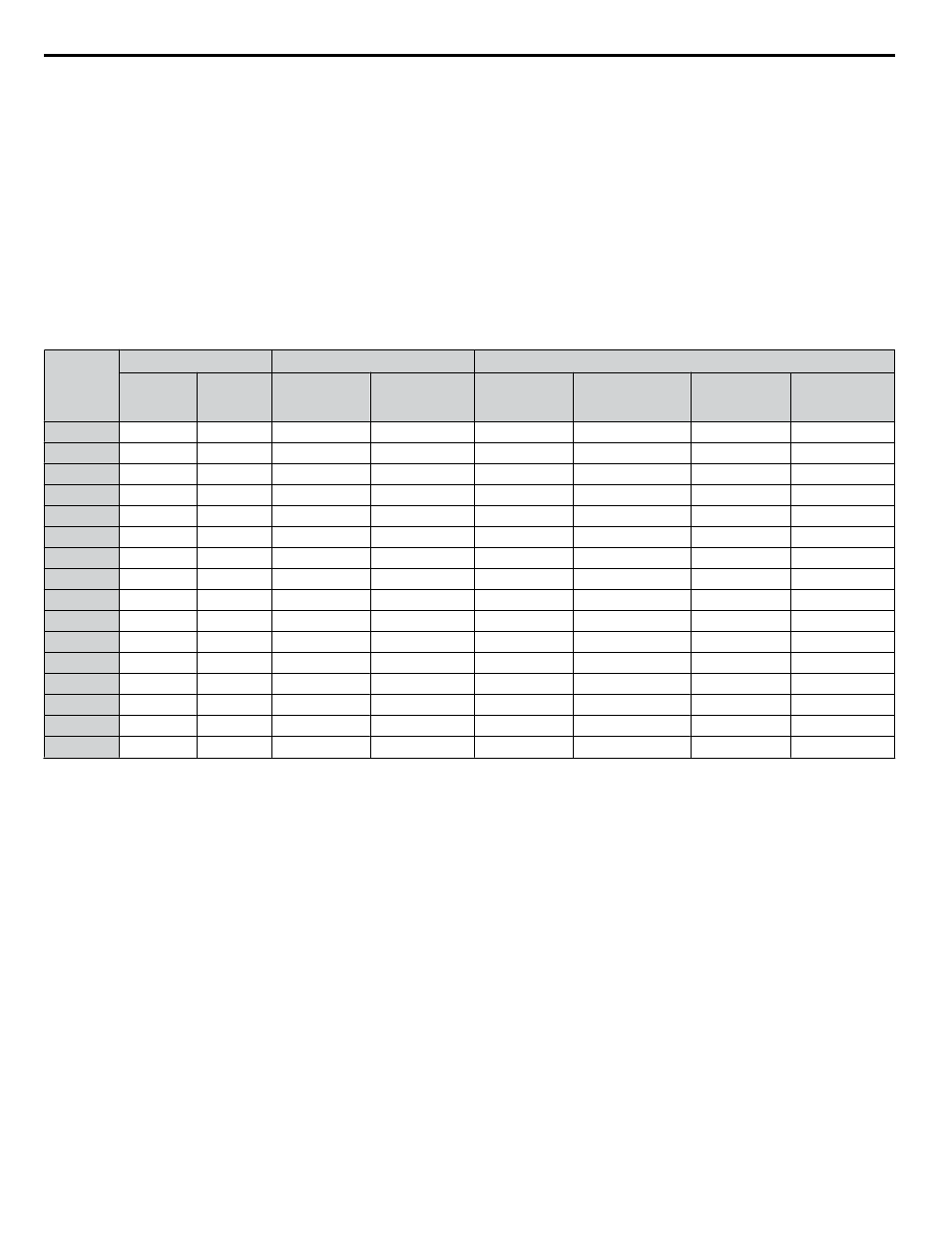
shows the relationship between the conditions and the value set to H1-oo:
Terminal statuses, detection conditions, and stopping methods marked with an “O” are applicable to the corresponding settings.
Table 5.31 Stopping Method for External Fault
Setting
Terminal Status
<1>
Detection Conditions
<2>
Stopping Method
N.O.
N.C.
Always
Detected
Detected during
Run only
Ramp to Stop
(fault)
Coast to Stop
(fault)
Fast Stop
(fault)
Alarm Only
(continue
running)
20
O
O
O
21
O
O
O
22
O
O
O
23
O
O
O
24
O
O
O
25
O
O
O
26
O
O
O
27
O
O
O
28
O
O
O
29
O
O
O
2A
O
O
O
2B
O
O
O
2C
O
O
O
2D
O
O
O
2E
O
O
O
2F
O
O
O
<1> Determine the terminal status for each fault, i.e., whether the terminal is normally open or normally closed.
<2> Determine whether detection for each fault should be enabled only during run or always detected.
Setting 30: PID Integral Reset
Configuring one of the digital inputs for PID integral reset (H1-oo = 30) resets the value of the integral component in PID
control to 0 when the terminal is closed.
Refer to PID Block Diagram on page 162
Setting 31: PID Integral Hold
Configuring a digital input for Integral Hold (H1-0o = 31) locks the value of the integral component of the PID control as
long as the input is active. The PID controller resumes integral operation from the hold value as soon as the integral hold input
is released.
Refer to PID Block Diagram on page 162
for more information on this function.
Setting 32: Multi-Step Speed Reference 4
Selects the multi-step speeds d1-09 to d1-16 in combination with the input terminal set for Multi-Step Speed 1, 2 and 3.
to d1-01 to d1-17: Frequency Reference 1 to 16 and Jog Frequency Reference on page 181
Setting 34: PID Soft Starter Cancel
A digital input configured as a PID soft starter cancel input (H1-0o = 34) enables or disables the PID soft starter and cancels
the PID accel/decel time (b5-17).
Refer to PID Block Diagram on page 162
.
Setting 35: PID Input Level Selection
Allows an input terminal to switch the sign of the PID input.
Refer to PID Block Diagram on page 162
5.7 H: Terminal Functions
210
YASKAWA SIEP YAIP1U 01B AC Drive - P1000 Technical Manual