Yaskawa MP920 User's Manual Design User Manual
Page 546
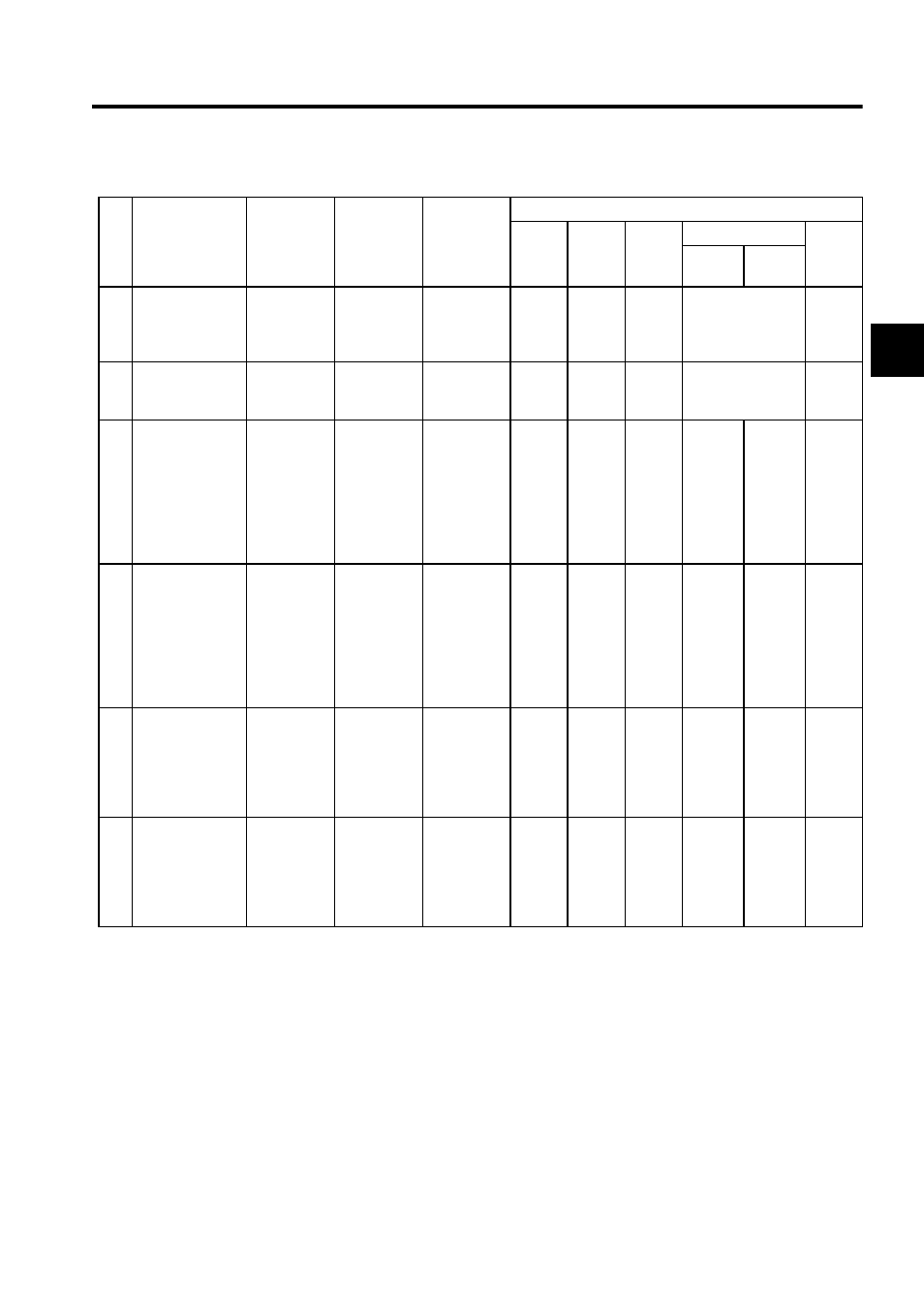
A.3 Parameter List
A-31
A
Note: 1. A horizontal line indicates the parameter is not used in that mode. Set the default setting.
2. In the Position column (Position Control Mode) under Basic Counter, Position 1 indicates
Position Control Mode without using OW20: Motion Command Code, and Position 2
indicates Position Control Mode using OW20: Motion Command Code.
55 Upper/Lower
Limit for Position
Control Integral
(ILIMIT)
OW36
0 to 32767
(Default =
32767)
−
32767
−
−
32767
−
56 Primary Lag
Time Constant
(LAGTi)
OW37
0 to 32767
(Default = 0)
1 = 1 ms
0
−
−
0
−
57 Position Buffer
Access Number
or Lower-place
Two Words of
the Encoder
Position at
Shutdown
(eposL)
OL3A
-2
31
to 2
31
-1
(Default = 0)
See 7.2.2
Motion Set-
ting Parame-
ters.
−
−
−
−
0
−
59 Position Buffer
Write Data or
Upper-place
Two Words of
the Encoder
Position at
Shutdown
(eposH)
OL3A
-2
31
to 2
31
-1
(Default = 0)
See 7.2.2
Motion Set-
ting Parame-
ters.
−
−
−
−
0
−
61 Lower-place
Two Words of
the Pulse
Position at
Shutdown
(aposL)
OL3C
-2
31
to 2
31
-1
(Default = 0)
See 7.2.2
Motion Set-
ting Parame-
ters.
−
−
−
−
0
−
63 Upper-place
Two Words of
the Pulse
Position at
Shutdown
(aposH)
OL3E
-2
31
to 2
31
-1
(Default = 0)
See 7.2.2
Motion Set-
ting Parame-
ters.
−
−
−
−
0
−
(cont’d)
No.
Name
Register
Number
Setting
Range
Meaning
Basic Counter
Zero
Point
Return
Speed
Torque
Position
Phase
Position
1
Position
2