Yaskawa MP920 User's Manual Design User Manual
Page 411
7 Parameters
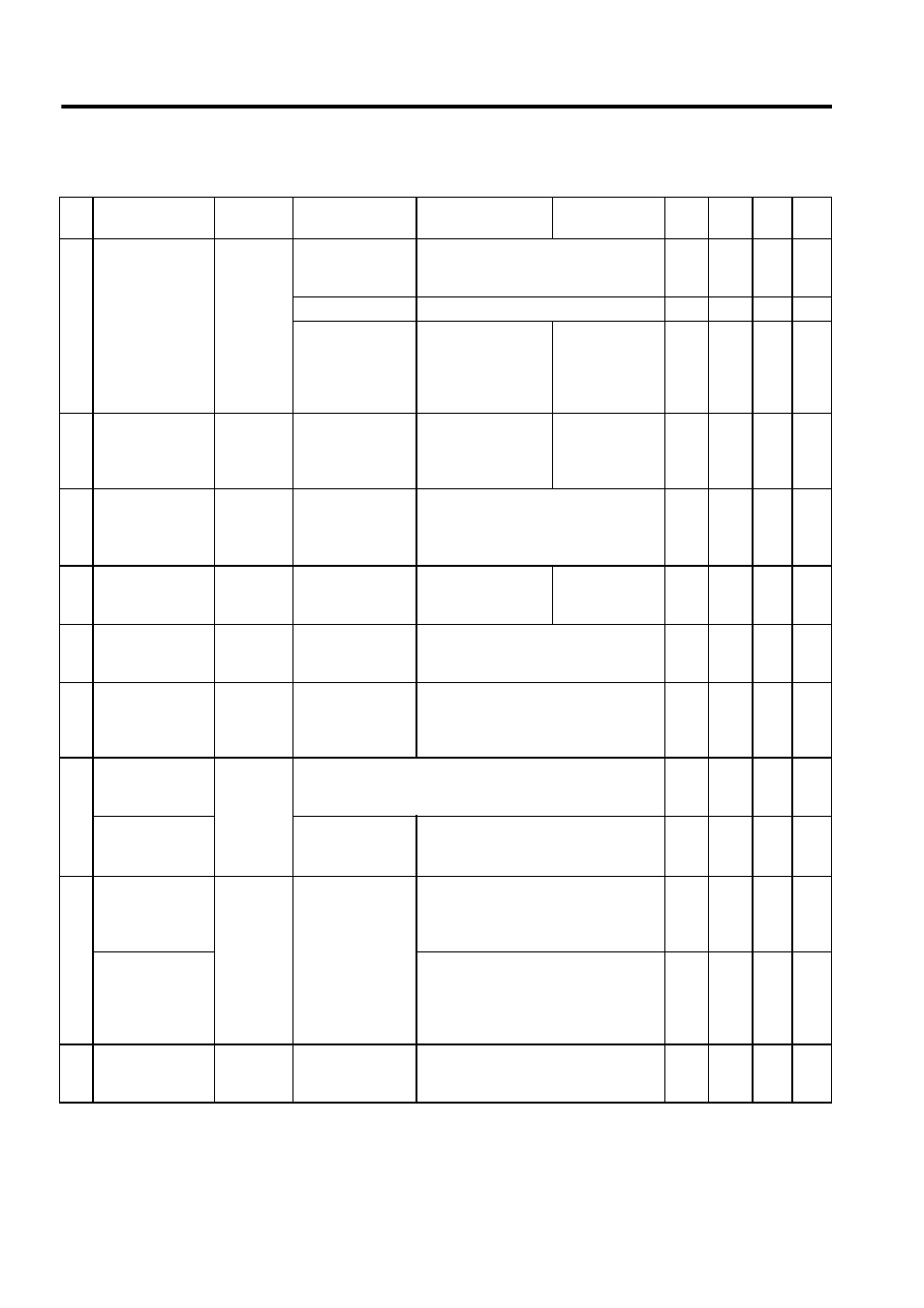
7.2.2 Motion Setting Parameters
7-16
46 Position Control
Flags
(POSCTRL)
(Default = 0, all
the bits are set to
OFF)
(cont’d)
OW 2D Bit 3: PUNITSEL
Position monitor 2 (IL
34) unit selec-
tion
0: Reference unit, 1: Pulse unit
9
9
Bits 4 to 11:
Not used
Bits 12 to 15:
USRMONSEL
Servo driver user
monitor information
selection
Setting range: 0
to 4
See the relevant
servo driver’s
manual.
9
47 Workpiece Coor-
dinate System
Offset
(OFFSET)
OL 2E
−2
31
to 2
31
−1
(Default = 0)
1 = 1 reference unit
1 = 1 pulse for
pulse units
9
9
9
9
49 Preset Number of
POSMAX Turns
Data
(
TURNPRS)
OL 30
−2
31
to 2
31
−1
(Default = 0)
1 = 1 rev (rotation)
9
9
9
9
51 Second In-posi-
tion Width
(INPWIDTH)
OW 32
0 to 65535
(Default = 0)
1 = 1 reference unit
1 = 1 pulse for
pulse units
9
9
9
52 Zero Point Posi-
tion Output Width
(PSETWIDTH)
OW 33
0 to 65535
(Default = 10)
1 = 1 reference unit
9
9
9
9
53 Positioning Com-
pleted Check
Time
(PSETTIME)
OW 34
0 to 65535
(Default = 0)
1 = 1 ms
9
9
9
54 Servo Driver Pa-
rameter No.
(Cn_No.)
OW 35
Set the SERVOPACK Cn constant number when the Motion
Command Code (OW
20) = 17 or 18.
(See the relevant servo driver’s manual for Cn constants.)
9
Position Control
Integral Time
(PTi)
0 to 32767
(Default = 300)
1 = 1 ms
9
9
55 Change Servo
Driver Parameter
Data
(Cn_DAT)
OL 36
−2
31
to 2
31
−1
(Default = 32767)
Set the Cn constant changed data when
the Motion Command Code (OW
20)
= 18.
9
Upper/Lower Lim-
it for Position
Control Integra-
tion
(ILIMIT)
9
9
56 Primary Lag Time
Constant
(LAGTi)
OW 37
0 to 32767
(Default = 0)
1 = 1 ms
9
9
Table 7.3 Motion Setting Parameters (cont’d)
No.
Name
Register
No.
Setting Range
Meaning
Remarks
SVA-
01A
SVA-
02A
SVB
-01
PO-
01