Yaskawa MP920 User's Manual Design User Manual
Page 406
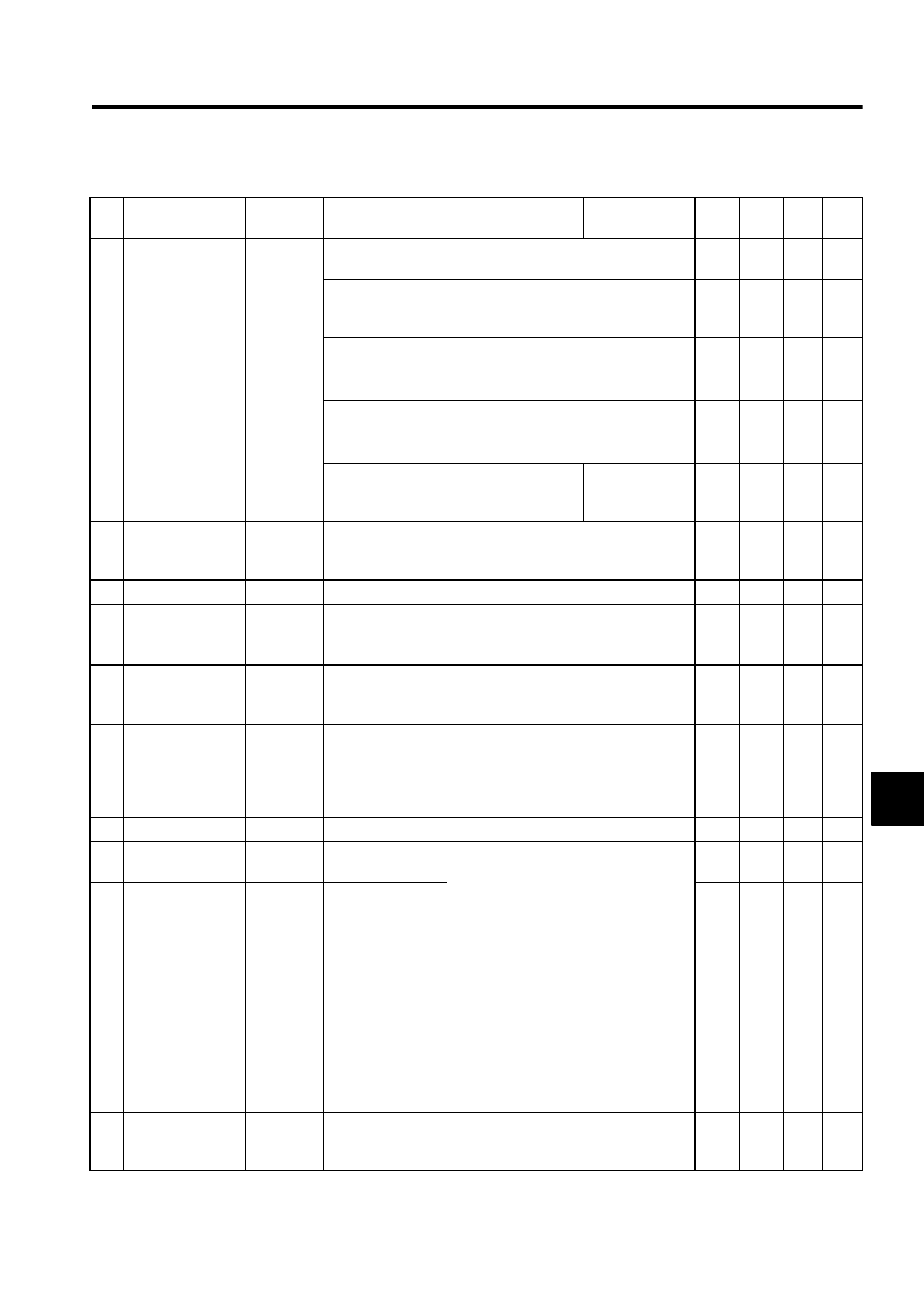
7.2 Parameters for Each Motion Module
7-11
7
2
RUN Command
Settings
(
SVRUNCMD)
(cont’d)
OW 01
Bit 11: EMRST
Emergency Stop/Deceleration to a Stop
Signal Reset
9
Bit 12: USE_BUF
Position Reference Value Selection
0: OL
12
1: Position buffer
9
9
9
9
Bit 13: SPDTYPE
Speed Reference Value Selection
0: OL
22
1: OW
15
9
9
9
9
Bit 14:
XREFTYPE
Position Reference Type
0: Absolute mode
1: Incremental addition mode
9
9
9
9
Bit 15: LSDEC
Zero Point Return
Deceleration Point
Limit Switch Signal
0: OFF
1: ON
9
9
9
3
Positive Torque
Limit Setting
(TLIMP)
OW 02
−32768 to 32767
(Default = -300.00)
1 = 0.01% (
−30000 = −300.00%)
9
4
Not used
OW 03
−
Set to 0.
5
Positive Speed
Limiter Setting
(
NLIMP)
OW 04
0 to 32767
(Default = 150.00)
1 = 0.01 % (15000 = 150.00 %)
9
9
6
Negative Speed
Limiter Setting
(
NLIMN)
OW 05
0 to 32767
(Default = 150.00)
1 = 0.01 % (15000 = 150.00 %)
9
9
7
Machine Coordi-
nate System Zero
Point Offset Set-
ting
(ABSOFF)
OL 06
−2
31
to 2
31
−1
(Default = 0)
1 = 1 reference unit
pulse units: 1 = 1 pulse
9
9
9
9
9
Not used
OL 08
−
Set to 0.
11
Approach Speed
Setting (NAPR)
OW 0A 0 to 32767
(Default = 0)
The unit will vary with the speed refer-
ence selection (OB
01D).
When the speed reference value selection
= 0
1 = 10
n
reference units/min
(n = Number of digits below decimal
point)
pulse units: 1 = 1000 pulses/min
(For PO-01 Module, 1 = 100 pulses/min)
mm units: 1 = 1mm/min
deg units: 1 = 1 deg/min
inch units: 1 = 1 inch/min
When the speed reference value selection
= 1
1 = 0.01 % (1000 = 10.00 %)
9
9
9
12 Creep Speed
Setting (NCLP)
OW 0B 0 to 32767
(Default = 0)
9
9
9
13 Linear Accelera-
tion Time Con-
stant (NACC)
OW 0C 0 to 32767
(Default = 0)
1 = 1 ms (300 = 0.300 s)
9
9
9
9
Table 7.3 Motion Setting Parameters (cont’d)
No.
Name
Register
No.
Setting Range
Meaning
Remarks
SVA-
01A
SVA-
02A
SVB
-01
PO-
01