Motion command list – Yaskawa MP920 User's Manual Design User Manual
Page 52
2 MP920 Specifications and System Configuration
2.1.3 Function Lists
2-26
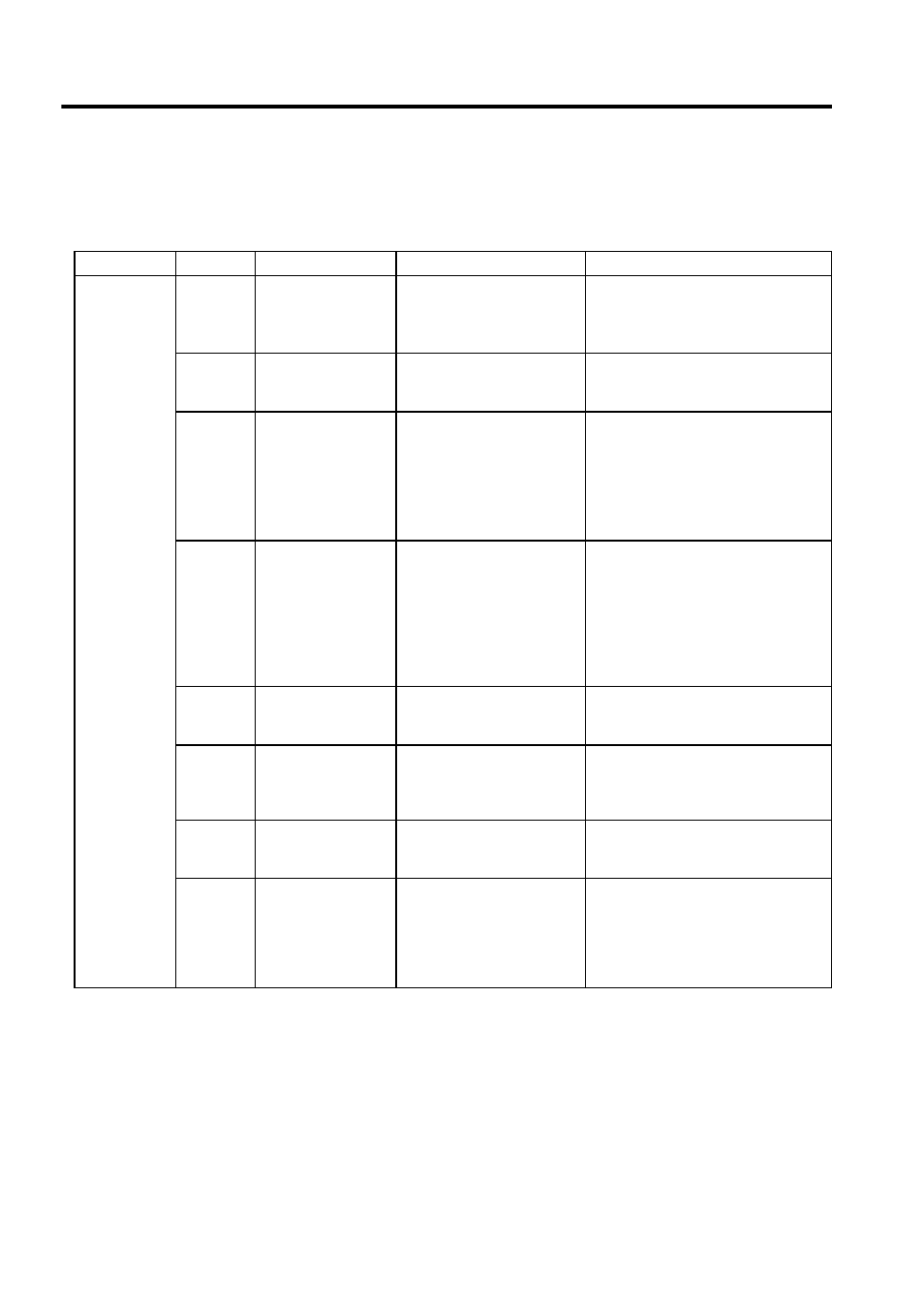
Motion Command List
The following table lists the motion commands.
Classification
Command
Name
Programming Format
Function/Meaning
Axis Move
Commands
MOV
POSITIONING
MOV [axis1]
− [axis2] − ···;
(Up to 16 axes can be desig-
nated.)
Executes positioning at rapid traverse
speed for up to 16 axes simultaneously.
In programming, replace “
−” with the
numerical data for each axis.
MVS
LINEAR
INTERPOLATION
MVS [axis1]
− [axis2] − ···F−;
(Up to 16 axes can be desig-
nated.)
Executes linear travel at interpolation
feed speed F for up to 16 axes simulta-
neously.
MCW
MCC
CLOCKWISE
CIRCULAR
INTERPOLATION
COUNTERCLOCK-
WISE CIRCULAR
INTERPOLATION
MCW [axis1]
− [axis2] − R−
F
−; MCC [axis1] − [axis2] −
U
− V− T− F−;
Executes circular interpolation at tangen-
tial speed F for two axes simultaneously
following radius R (or designated center
point coordinates).
With the center point coordinate designa-
tion, multiple circles can be designated
with T
−. (T− can also be omitted.)
MCW
MCC
CLOCKWISE
HELICAL
INTERPOLATION
COUNTERCLOCK-
WISE HELICAL
INTERPOLATION
MCW [axis1]
− [axis2] −U−
V
− [axis3] −T− F−;
MCC [axis1]
− [axis2] −R−
[axis3]
−F-;
Moves three axes simultaneously in a
combination of circular interpolation and
linear interpolation outside of the circular
interpolation plane. Speed F will be the
circular interpolation tangential speed.
With the center point coordinate designa-
tion, the number of turns can be desig-
nated with T
−. (T− can also be omitted.)
ZRN
ZERO POINT
RETURN
ZRN [axis1]
− [axis2] − ···;
(Up to 16 axes can be desig-
nated.)
Returns each axis to its zero point.
SKP
SKIP
SKP [axis1]
− [axis2]- ··· SS−;
(Up to 16 axes can be desig-
nated.)
If the SKIP signal turns ON during a lin-
ear interpolation operation, skips the
remaining movement and proceeds to the
next block.
MVT
SET TIME
POSITIONING
MVT [axis1]
− [axis2] − ··· T−;
(Up to 16 axes can be desig-
nated.)
Executes positioning by clamping the
feed speed so that travel can be com-
pleted at the designated time.
EXM
EXTERNAL
POSITIONING
EXM [axis1]
− D−;
When an external positioning signal is
input while external positioning is being
executed, only the travel distance desig-
nated by “D
−” is positioned with an
incremental value, and then the next com-
mand is executed.