3 initializing the absolute encoder, Initializing a 12-bit absolute encoder – Yaskawa MP920 User's Manual Design User Manual
Page 455
10 Absolute Position Detection
10.2.3 Initializing the Absolute Encoder
10-10
Validation of Number of Feedback Pulses for High Resolution/ Num-
ber of Feedback Pulses per Rotation (For High-Resolution)
• MP920 SVB-01 Module fixed parameter No. 14, bit 9
• MP920 SVB-01 Module fixed parameter No. 9
Always set the bit 9 of MP920 fixed parameter No. 14 to ON when the MP920 SVB-01
Module is connected to
Σ
-II series SERVOPACK.
Setting this bit to ON enables the fixed parameter No. 9 Number of Feedback Pulses per
Rotation (For High-Resolution) and disables the fixed parameter No. 8 Number of Feedback
Pulses per Rotation.
The setting values for the fixed parameter No. 9 are the same as for the fixed parameter No.
8 Number of Feedback Pulses per Rotation. Refer to the explanations on Number of Feed-
back Pulses per Motor Rotation/Number of Encoder Pulses/PG Dividing Ratio.
10.2.3
Initializing the Absolute Encoder
Initialize the absolute encoder in the following situations.
• When the absolute position detection system is started up for the first time
• When the number of rotations from the absolute reference position of the absolute
encoder needs to be initialized to 0
• When a Servomotor has been left disconnected for more than four days with no battery
connected to the absolute encoder
• When an alarm occurs
Initializing a 12-bit Absolute Encoder
Follow the procedure below to initialize a 12-bit absolute encoder.
1. Properly connect the SERVOPACK, Servomotor, and MP920.
2. Reset Absolute Position Data in the encoder.
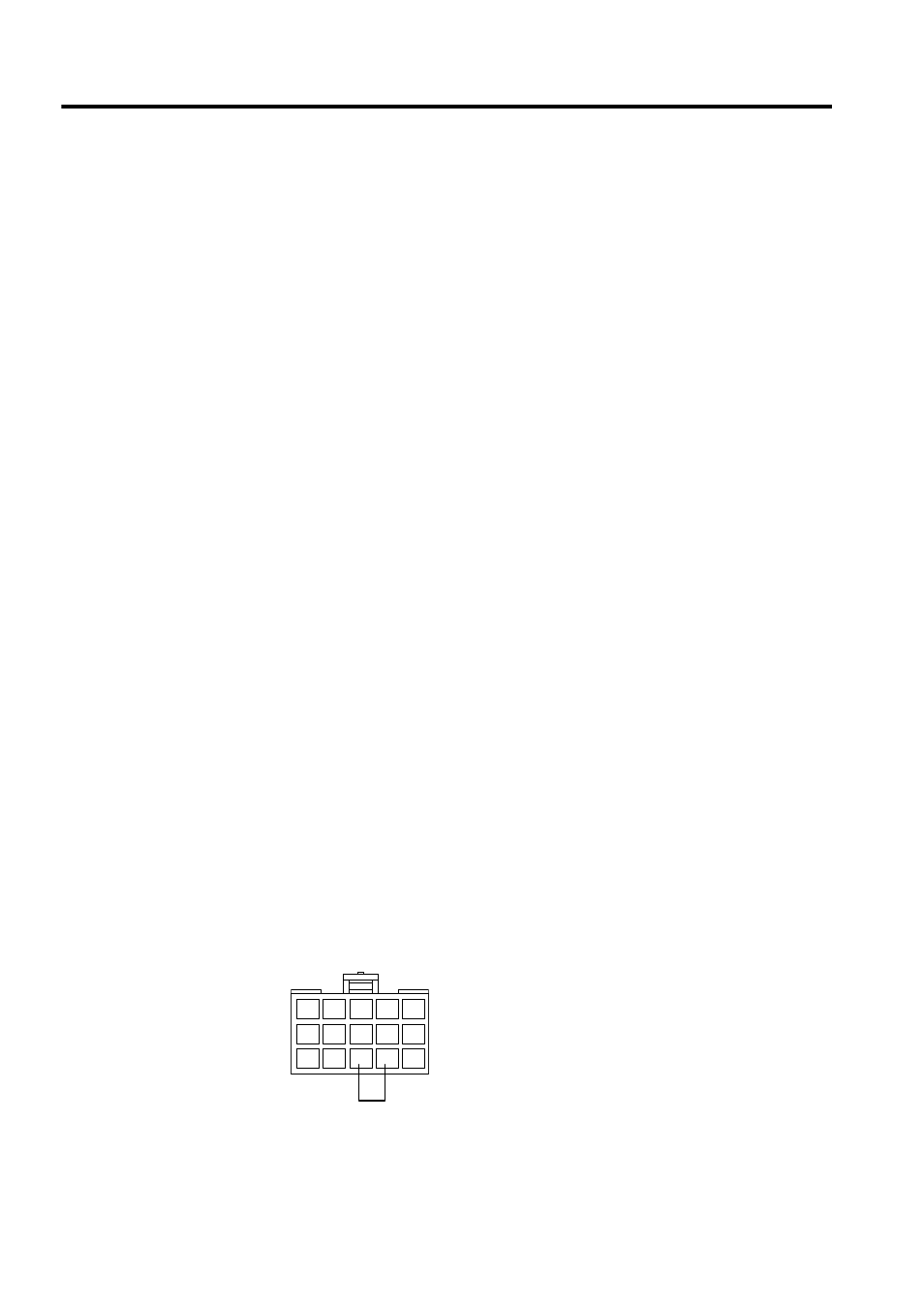
a) Disconnect the connector on the encoder end.
b) Use a short piece to short-circuit together connector pins 13 and 14 on the encoder
end for 1 to 2 seconds.
c) Remove the short piece and insert the connector securely in its original position.
3. Rewire the cables using normal wiring and make sure the encoder battery is connected.
13 14