Yaskawa MP920 User's Manual Design User Manual
Page 180
4 Motion Control
4.4.4 Zero Point Return (ZRET)
4-66
6. Zero point return (ZRET) starts.
The axis travels at rapid traverse speed in the direction specified by the zero point return
direction selection (OBC0009).
The motion parameter setting values cannot be changed during a zero point return opera-
tion.
The zero point return command operations are as follows:
a) Operation Start
Servo ON (bit 0 of OW01). Excitation ON for PO-01 Module.
Set the zero point return (ZRET) to motion command code (OW20).
b) Feed Hold
Not possible.
c) Abort
Set Abort (bit 1 of OW21) to ON, or set NOP (= 0) in the motion command code.
Busy (bit 0 of IW15) turns ON during abort processing, and turns OFF at abort
completion.
Note: Even when the abort is completed and the abort is released (ABORT
turns OFF), operations remain stopped.
7. The axis decelerates to approach speed at the falling edge of the dog (deceleration limit
switch) signal.
8. The axis decelerates to creep speed at the rising edge of the dog (deceleration limit
switch) signal.
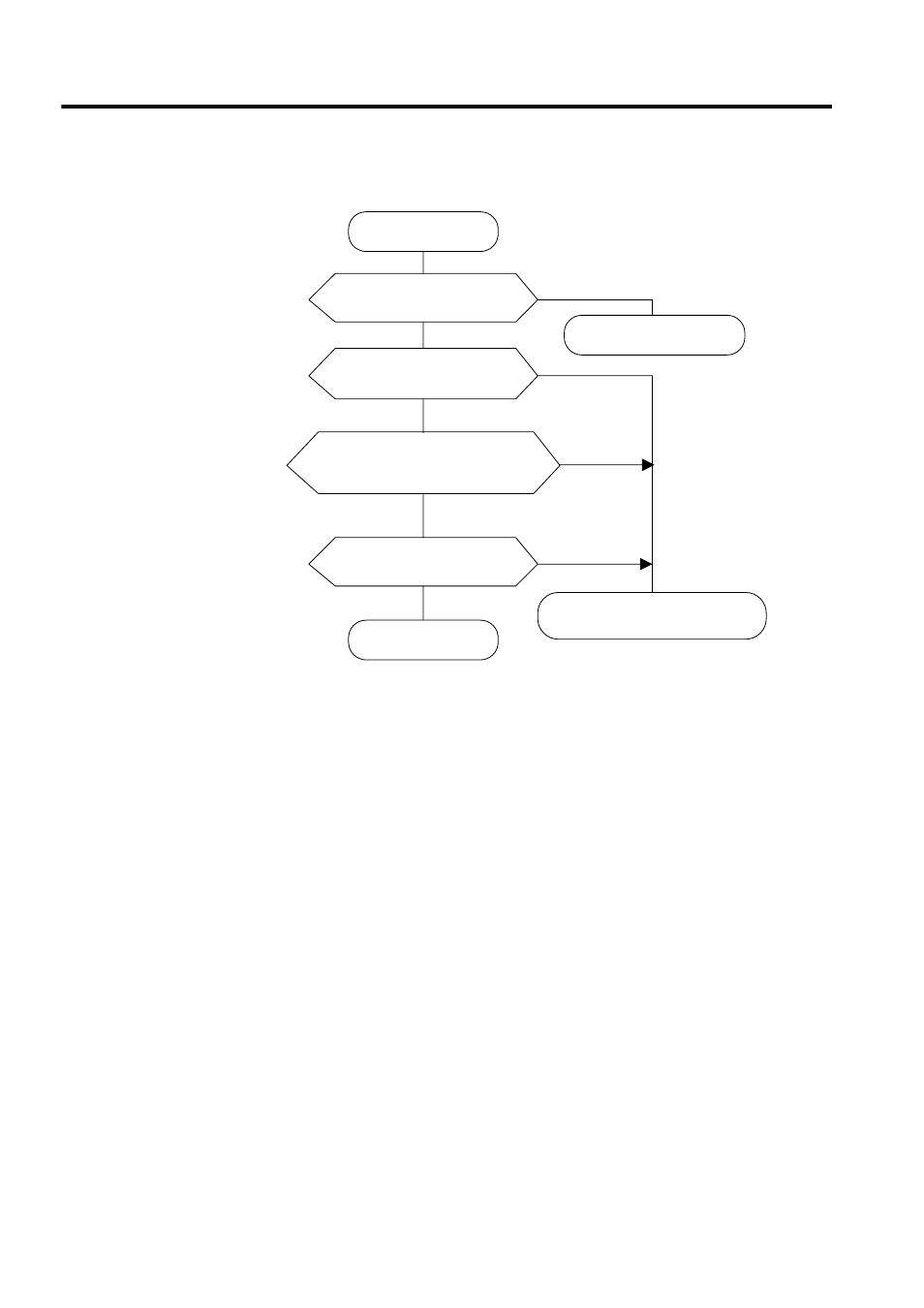
YES
YES
YES
NO
NO
NO
YES
NO
Return (OK)
ZRET
Start condition check
Control mode
= position control mode?
Return (NG)
Motion command code
=NOP
||ENDOF_INTERPOLATE?
Motion command response
=NOP
||INTERPOLATE||
ENDOF_INTERPOLATE?
Motion command status
BUSY=OFF?
Return (NG)