2 electronic gear – Yaskawa MP920 User's Manual Design User Manual
Page 420
8.2 Electronic Gear
8-3
8
8.2
Electronic Gear
An electronic gear converts position or speed units into user units (reference units) and internal
controller units (pulses), and it converts pulses into reference units. The electronic gear function
is not used to select a detector (encoder) suitable for the machine system but rather for position
control.
Forward Electronic Gear Conversion
Controller units [pulses] =
× Reference units position
Electronic gear numerator
Electronic gear denominator
Electronic gear numerator = Servomotor Gear Ratio
× Number of Pulses Per Servomotor
Rotation (multiplied by the multiplier)
Electronic gear numerator = Machine Gear Ratio
× Distance Traveled Per Machine Rotation
* When the electronic gear system is structured so that the shaft on the machine end
will turn n times when the shaft on the Servomotor end turns m times, m is the
Servomotor gear ratio and n is the machine gear ratio.
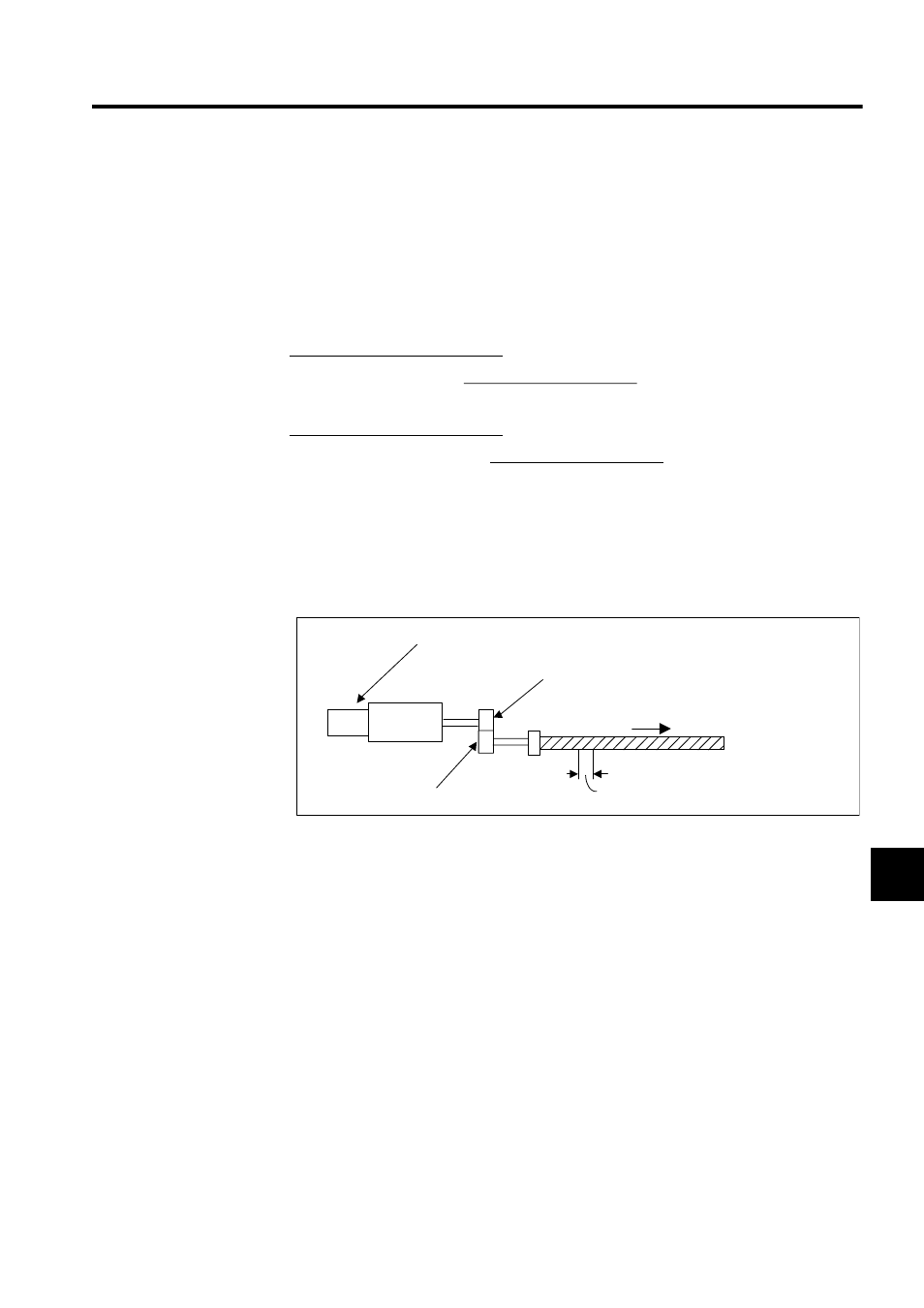
Electronic Gear Concept
Positioning speed
Servomotor
PG
Servomotor Gear Ratio*
Machine Gear Ratio
Number of Pulses Per Servomotor Rotation (multiplied by the multiplier)
Distance Traveled Per Machine Rotation
*
Reverse Electronic Gear Conversion
User reference units position =
× Controller internal unit position
Electronic gear numerator
Electronic gear denominator
[reference units]
[pulses]
[reference units]