Σ-ii series servopack selection – Yaskawa MP920 User's Manual Design User Manual
Page 453
10 Absolute Position Detection
10.2.2 Setting Related Parameters
10-8
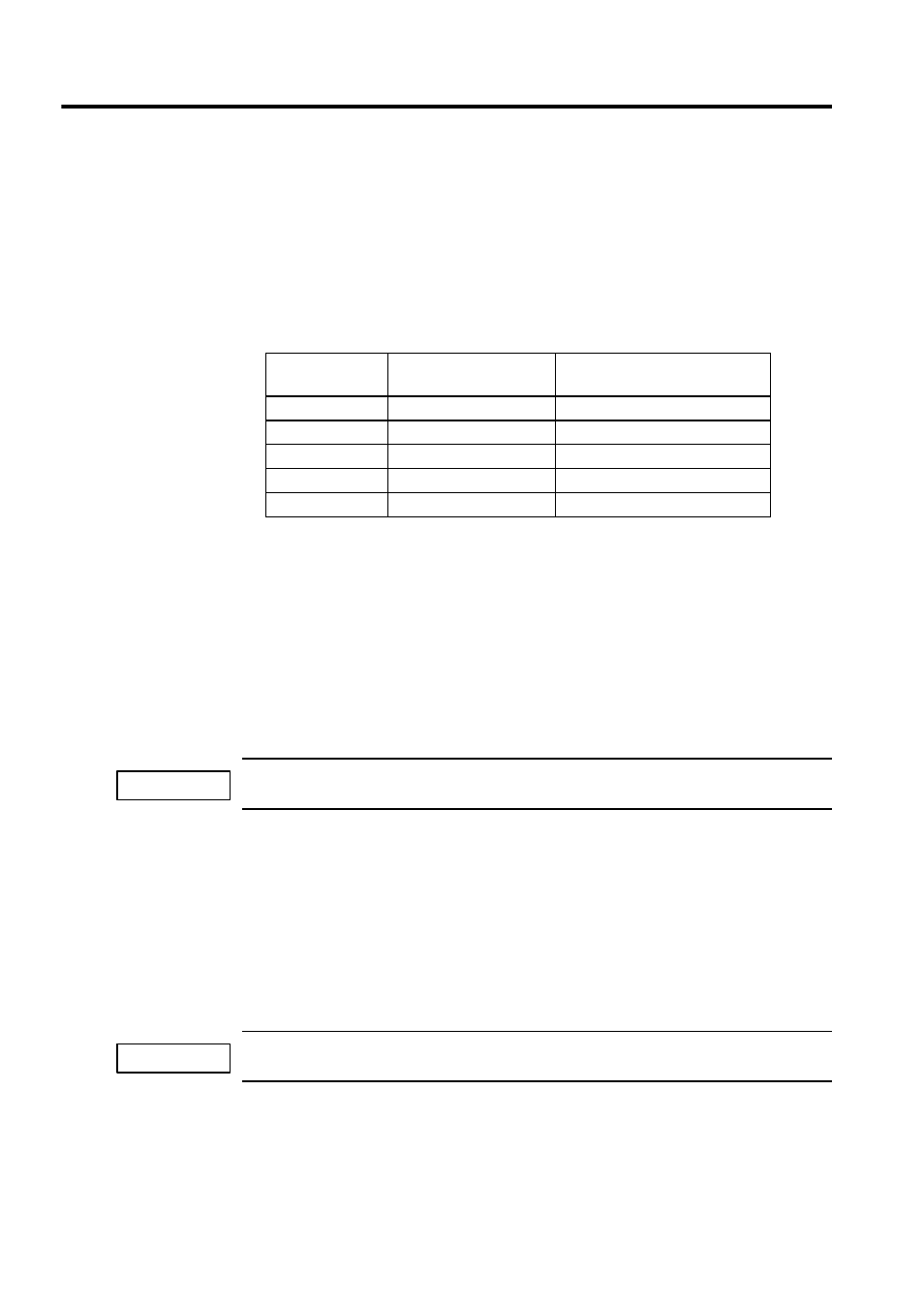
Number of Feedback Pulses per Motor Rotation/Number of Encoder
Pulses/PG Dividing Ratio
• MP920 fixed parameter No. 8
• SERVOPACK parameter Cn-0011, Pn201
Set the number of absolute encoder pulses in the MP920 fixed parameter No. 8 and SERVO-
PACK parameter Cn-0011 or Pn201 as shown in the table below.
* When using an SVA-01 or SVA-02 Module in combination with an
encoder of 16 bits or more, rotating the servomotor at 3,000 min
-1
or
faster may cause errors in counting pulses because the response fre-
quency exceeds 1 MHz.
To avoid such errors, make settings for 15-bit encoder.
(The SVA-01A and SVA-02A hardware version B5 or later supports the
response frequency 1.5 MHz. For these models, the settings for 16-bit
encoder can be used.)
Be sure to set both MP920 parameter and SERVOPACK parameter since the both parame-
ters are used.
If the above parameters are not correctly set, the motion control will not be performed correctly.
Σ-II Series SERVOPACK Selection
• MP920 SVA-01A/SVA-02A Module fixed parameter No. 14, bit 9
Set the above bit to ON when the MP920 SVA-01A/SVA-02A Module is connected to
Σ
-II
series SERVOPACK.
Set to OFF when the MP920 SVA-01A/SVA-02A Module is connected to
Σ
series SERVO-
PACK.
If the above parameters are not correctly set, the position may be shifted.
No. of Bits
MP920
Fixed Parameter No. 8
SERVOPACK Parameter
(
Cn-0011/Pn201)
12
1024
1024
13
2048
2048
14
4096
4096
15
8192
8192
16 or more
16384 *
16384 *
IMPORTANT
IMPORTANT