Yaskawa MP920 User's Manual Design User Manual
Page 416
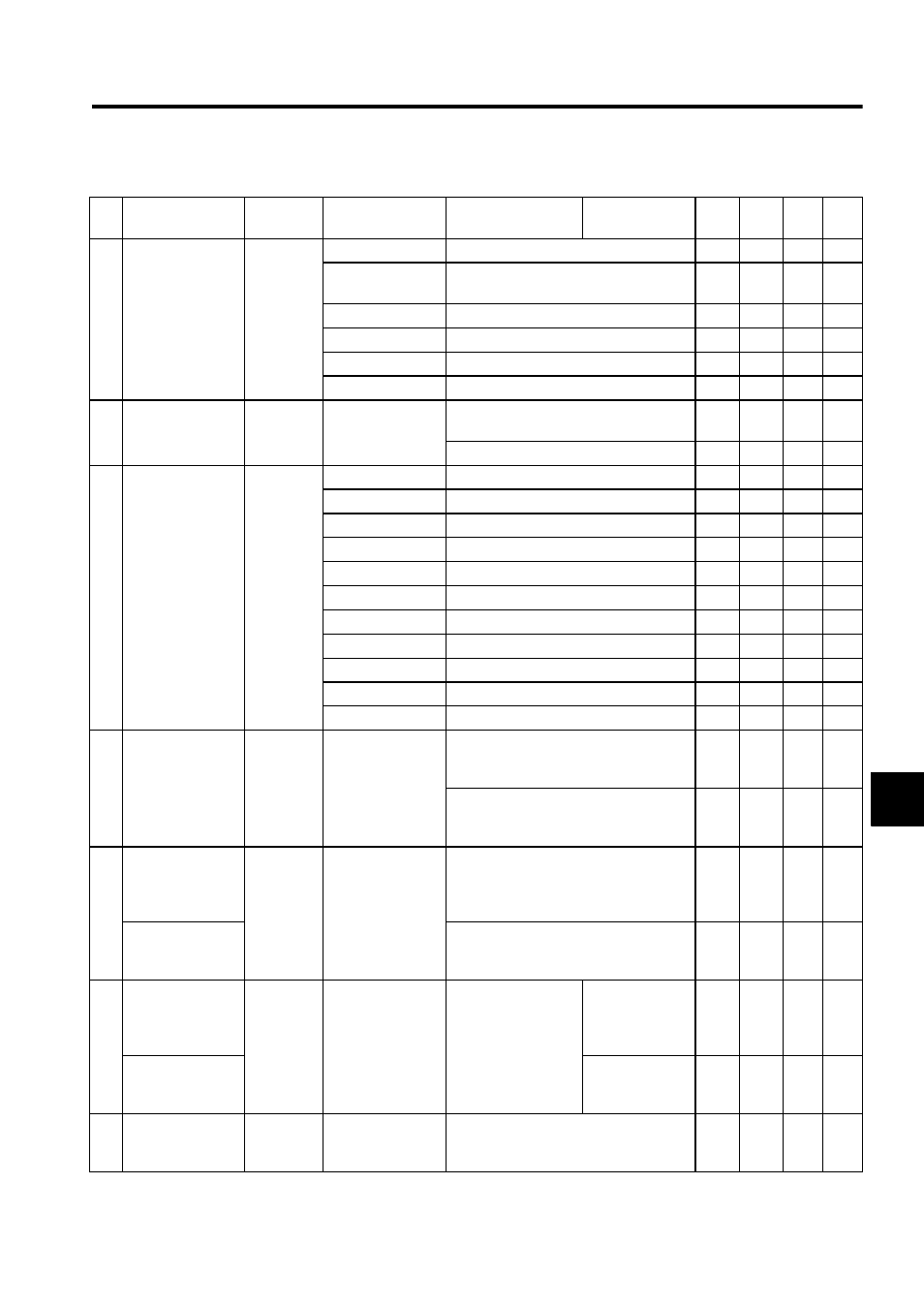
7.2 Parameters for Each Motion Module
7-21
7
35 Alarms
(ALARM)
(cont’d)
IL 22
Bit 15: COM_ERR Servo driver communications error
9
Bit 16: SVTI-
MOUT
Servo driver command timeout
9
Bit 17: ABSOVER
ABS encoder rotations exceeded
9
9
9
Bit 18: PGLFLT
Broken PG wire error
9
9
Bit 19:
Not used
Bits 20 to 31:
Not used
37 Servo Driver
Alarm Code
(SVALARM)
IW 24
−32768 to 32767
Error code when an absolute position read
error occurs
9
9
Alarm code that is occurring
9
38 Servo Driver I/O
Monitor
(ALARM)
IW 25
Bit 0: P-OT
Forward limit switch input
9
Bit 1: N-OT
Reverse limit switch input
9
Bit 2: DEC
Deceleration dog switch input
9
Bit 3: PA
Encoder phase-A signal input
9
Bit 4: PB
Encoder phase-B signal input
9
Bit 5: PC
Encoder phase-C signal input
9
Bit 6: EXT1
1st external (latch) signal input
9
Bit 7: EXT2
2nd external (latch) signal input
9
Bit 8: EXT3
3rd external (latch) signal input
9
Bit 9: BRK
Brake status output
9
Bits 10 to 15:
Not used
39 Speed Refer-
ence Output Mon-
itor
(pulse/s)
(RVMON)
IL 26
−2
31
to 2
31
−1
Valid when the Speed Reference Value
Selection (OB
01D) = 0.
1 = 1 reference unit/s
9
Valid when the Speed Reference Value
Selection (OB
01D) = 0.
1 = 1 reference unit/high-speed scan
9
9
9
41 Cn Constant
Read Data
(
CNMON)
IL 28
−2
31
to 2
31
−1
Stores the data of the SERVOPACK Cn
conatant specified by OW
35 when
the Motion Command Code (OW
20)
= 17.
9
Position Buffer
Read Data
(CNMON)
Copies the position buffer data when the
Motion Command Control Flag BUF_R
(OB
21F) = 1.
9
9
9
43 Position Refer-
ence Output Mon-
itor
(XREFMON)
IL 2A
−2
31
to 2
31
−1
1 = 1 pulse
Absolute posi-
tion in units of
pulse
9
Number of Output
Pulses
(XREFMON)
9
45 Integral Output
Monitor
(YIMON)
IL 2C
−2
31
to 2
31
−1
9
9
Table 7.4 Motion Monitoring Parameters (cont’d)
No
Name
Register
No.
Bit
(Setting Range)
Meaning
Remarks
SVA-
01A
SVA
-02A
SVB
-01
PO-
01