Yaskawa MP920 User's Manual Design User Manual
Page 415
7 Parameters
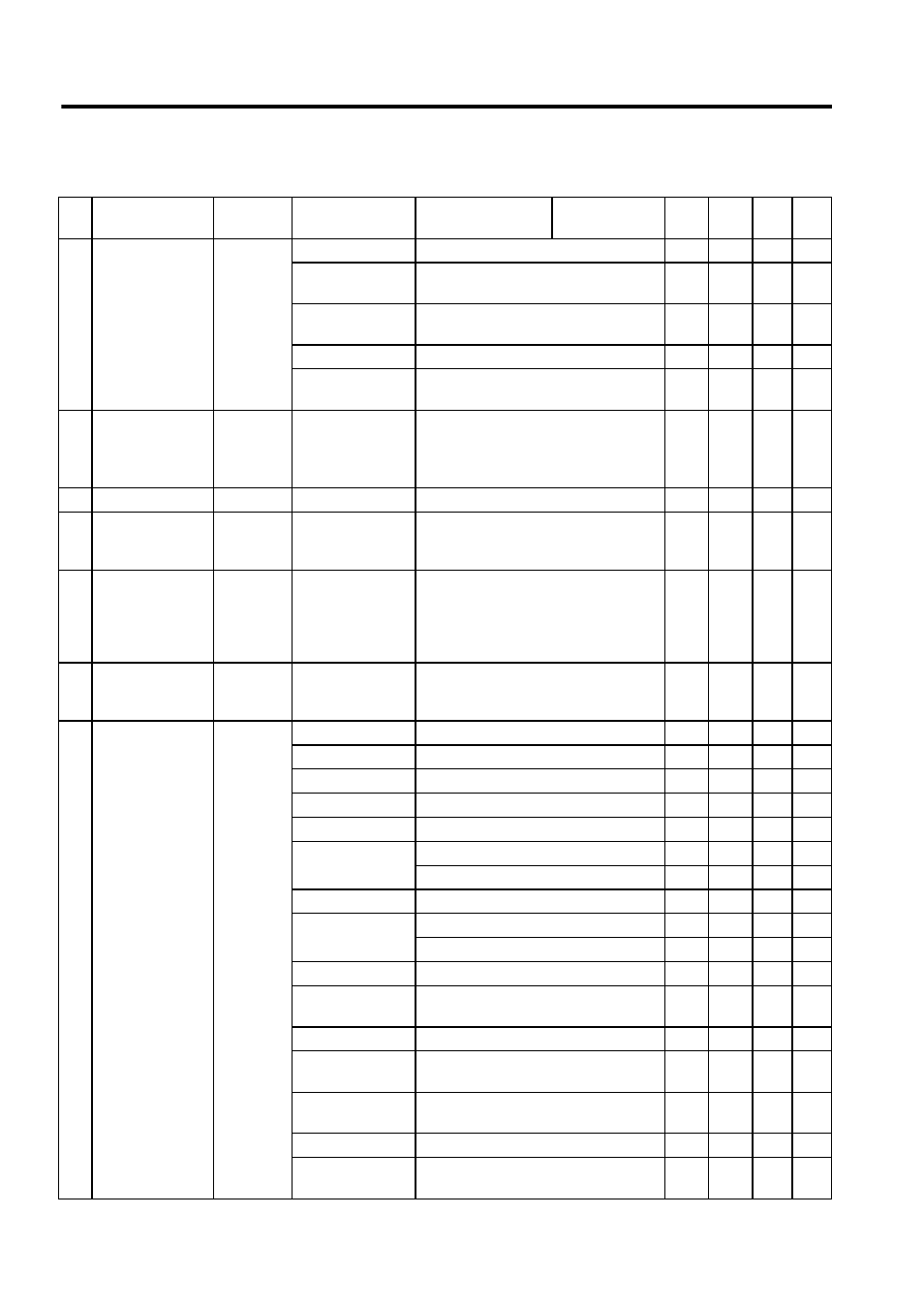
7.2.3 Motion Monitoring Parameter
7-20
24 Position Control
Status
(POSSTS)
(cont’d)
IW 17
Bit 4: TPRSE
No. of POSMAX turns preset completed
9
9
9
9
Bit 5: GEARM
Copies the fixed parameter Electronic
Gear Selection.
9
9
9
9
Bit 6: MODSELM Copies the fixed parameter Axis
Selection.
9
9
9
9
Bits 7 to 11:
Not used
Bits 12 to 15:
USRMONSELR
Servo driver user monitor data selection
response
9
25 Machine Coordi-
nate System Ref-
erence Position
(MPOS)
IL 18
−2
31
to 2
31
−1
1 = 1 reference unit
1 = 1 pulse for pulse unit
Will not be updated when the machine is
locked.
9
9
9
9
27 Not used
IL 1A
−
−
29 POSMAX Monitor
(
PMAXMON)
IL 1C
1 to 2
31
−1
1 = 1 reference unit
Copies the motion fixed parameter POS-
MAX.
9
9
9
9
31 Number of POS-
MAX Turns
(
PMAXTURN)
IL 1E
−2
31
to 2
31
−1
1 = 1 rev (rotation)
Increments or decrements the count each
time the POSMAX is exceeded.
(Will be reset to 0 when the power is
turned ON.)
9
9
9
9
33 Servo Driver User
Monitor Data
(USRMON)
IL 20
−2
31
to 2
31
−1
See the relevant servo driver manual.
9
35 Alarms
(ALARM)
IL 22
Bit 0: SVERROR
SERVOPACK fault
9
Bit 1: OTF
Positive overtravel
9
9
9
Bit 2: OTR
Negative overtravel
9
9
9
Bit 3: SOTF
Positive software limit
9
9
9
9
Bit 4: SOTR
Negative software limit
9
9
9
9
Bit 5: SVOFF
Servo OFF
9
Excitation OFF
9
Bit 6: TIMEOVER
Positioning time over
9
9
9
Bit 7: DISTOVER
Positioning travel amount exceeded
9
Speed exceeded
9
Bit 8: FILTYOERR Filter type change error
9
Bit 9:
FILTYMERR
Filter time constant change error
9
Bit 10: MODERR
Control mode error
9
9
9
9
Bit 11:
ZSET_NRDY
Zero point not set
9
9
9
Bit 12:
ZSET_MOV
Zero point set during movement
9
Bit 13: CN_ERR
Servo driver Cn constant setting error
9
Bit 14: WDT_ERR Servo driver synchronized communica-
tions error
9
Table 7.4 Motion Monitoring Parameters (cont’d)
No
Name
Register
No.
Bit
(Setting Range)
Meaning
Remarks
SVA-
01A
SVA
-02A
SVB
-01
PO-
01