Yaskawa MP920 User's Manual Design User Manual
Page 401
7 Parameters
7.2.1 Motion Fixed Parameters
7-6
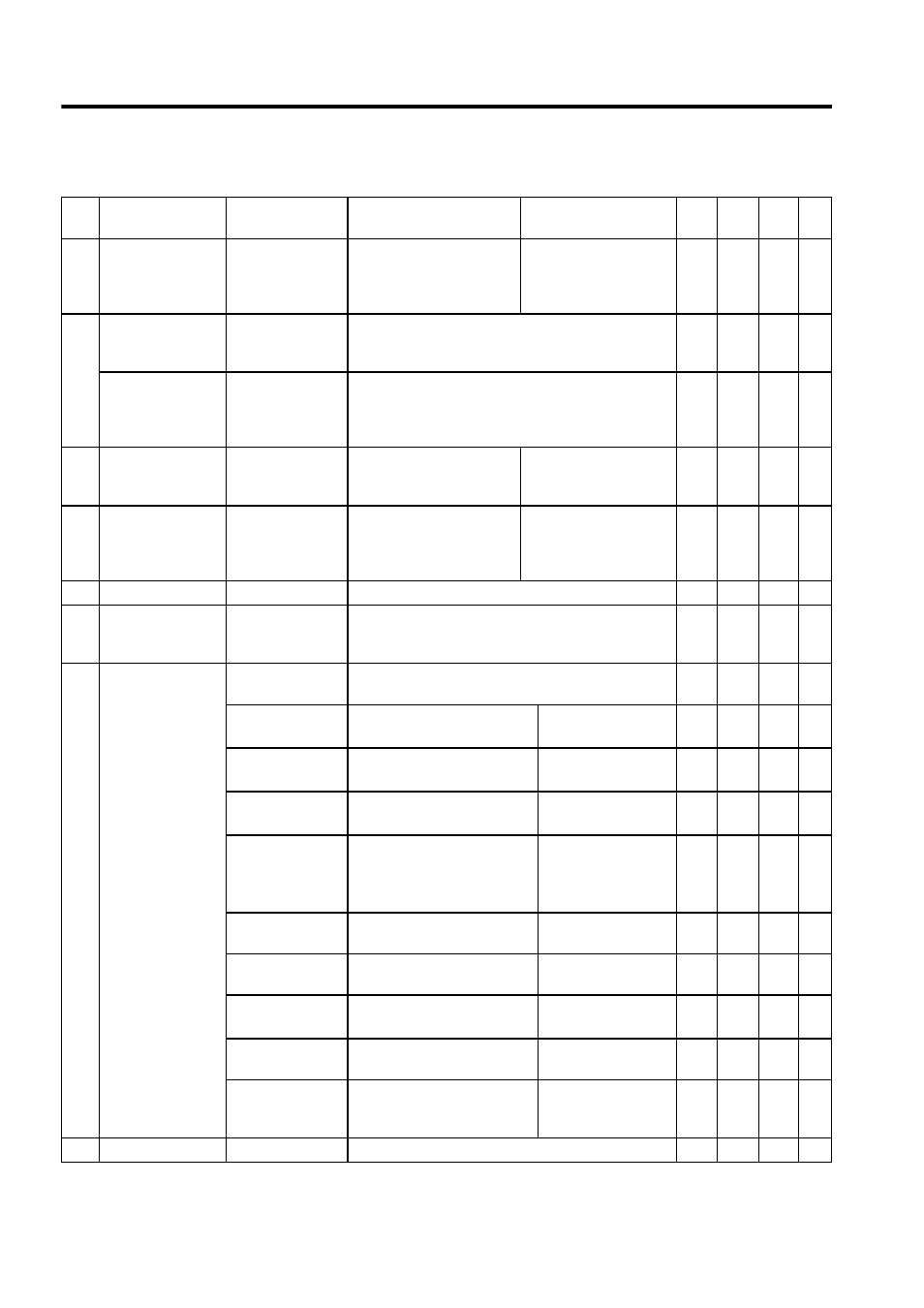
Table 7.2 Motion Fixed Parameters (cont’d)
No.
Name
Setting Range
Meaning
Remarks
SVA
-01A
SVA
-02A
SVB
-01
PO
-01
8
Number of Feed-
back Pulses Per
Rotation (FBppr)
Multiple of 4
between 4 and
65532
(Default = 2048)
1 = 1 pulse/rev
Set the value prior to
multiplying.
√
√
√
9
D/A Output Volt-
age at 100%
Speed (V1)
0.001 to 10.000
(Default = 6 V =
6.000)
1 = 1V
√
√
Number of
Feedback Pulses
per Rotation (for
High-resolution)
(Default = 2048)
1 = 1 pulse/rev
√
10
D/A Output Volt-
age at 100%
Torque Limit (V2)
0.001 to 10.000
(Default = 3 V =
3.000)
1 = 1V
Valid only for 2-axis
SVA-02A Modules.
√
11
Input Voltage at
100% Speed Mon-
itoring (A/D)
(MV1)
0.001 to 10.000
(Default = 6 V =
6.000)
1 = 1V
Valid only for 2-axis
SVA-02A Modules.
√
12
Not used.
−
−
13
DI Latch Signal
Selection
(DIINTSEL)
0 or 1
(Default = 0)
0: DI input signal
1: C pulse input signal
√
√
14
Additional Func-
tion Selections
(AFUNCSEL)
Bit 0 to 1: Not
used.
−
Bit 2: LIMITSEL
Limit Switch Signal Selection
0: Use OB01F.
1: Use the DI signal.
√
√
Bit 3: LMT_LSEL
Reverse Limit Signal Selection
for Zero Point Return
0: Use OB21C.
1: Use the DI signal.
√
Bit 4: LMT_RSEL
Forward Limit Signal Selection
for Zero Point Return
0: Use OB21D.
1: Use the DI signal.
√
Bit 5: EMGSEL
Emergency Stop Signal Selec-
tion
0: Emergency stop
(hardware)
1: Deceleration to
stop (software)
√
Bit 6: ABSRDSEL
Absolute Position Read at Star-
tup
0: Execute.
1: Do not execute.
√
√
Bit 7: MCMDSEL
Motion Command Code Selec-
tion
0: Not used.
1: Use.
√
√
√
Bit 9:
Σ-II Series SERVOPACK
Selection
0: OFF
1: ON
√
√
Bits 12 to 15:
Error Count Alarm Datection
Setting Coefficient
Setting range: 0 to 4
√
√
Bit 9:
Selection for Feedback Pulses
per Motor Rotation for High
Resolution
0: Disabled
1: Enabled
√
15
Not used.
−
−