Yaskawa MP920 User's Manual Design User Manual
Page 380
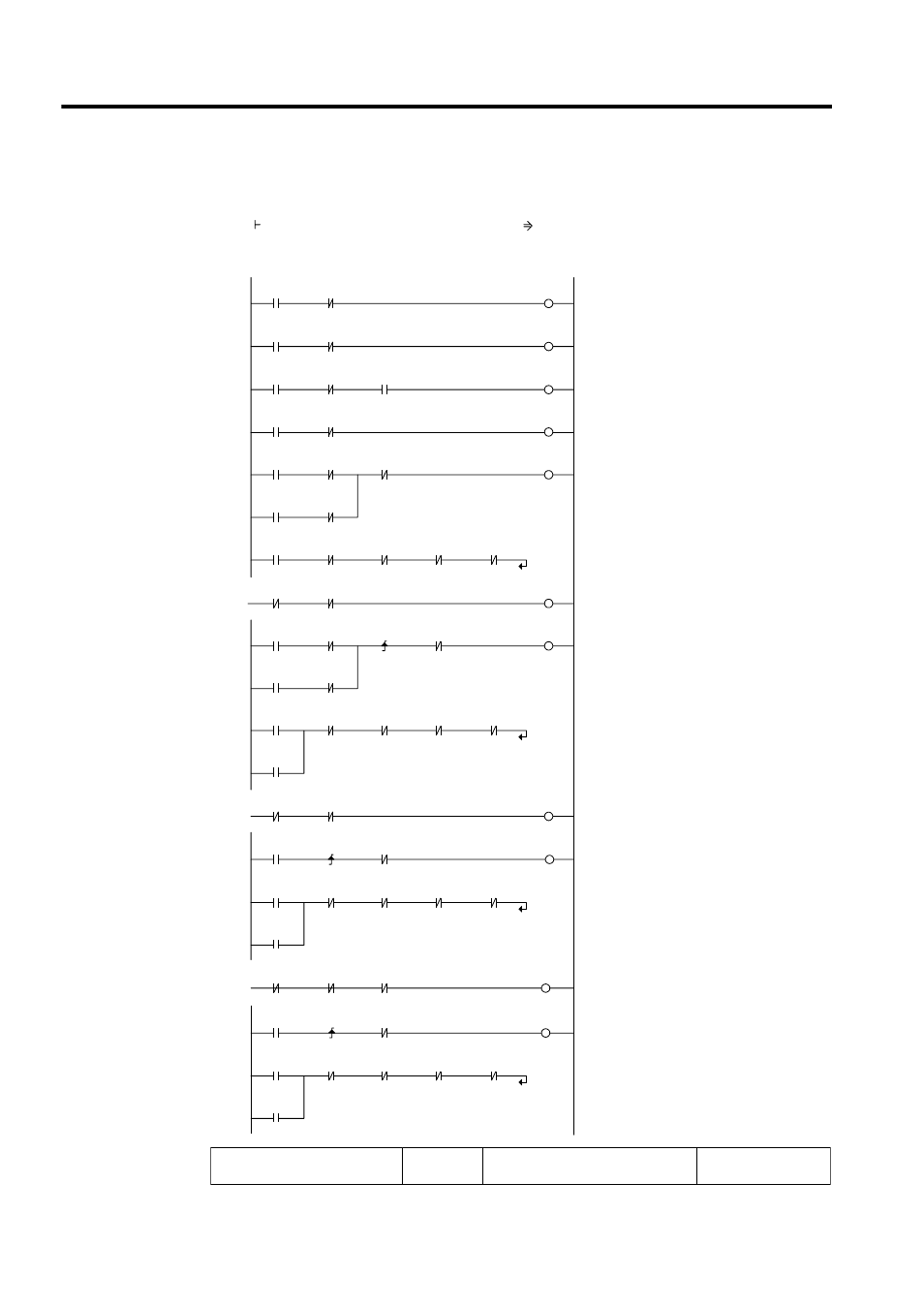
6 System Startup
6.2.5 Ladder Logic Programs
6-50
Command
BUSY
Command
BUSY
Command
BUSY
Zero point return
completed
(Servo parameter)
Axis alarm
generated
R-FEED
JOG+
JOG-
FEED command
completion check
FEED completed
R-STEP
R-ZRET
STEP completed
ZRET completed
ZSET completed
R-ZSET
JOG-
JOG+
FEED start
request
Axis alarm
generated
R-FEED
Stop
ZRET
ZSET
STEP+
STEP-
STEP history
STEP+
STEP-
STEP start request
FEED command
operating
STEP command
operating
ZERT command
operating
STEP-
STEP+
STEP start
request
R-STEP
Stop
Stop
JOG+
JOG-
STEP command
operating
ZRET command
operating
ZRET command
operating
ZRET
ZSET
ZRET
ZRET start
request
ZRET history
Axis alarm generated
ZRET start request
R-ZRET
JOG+
JOG-
STEP+
STEP-
ZSET
ZSET
ZSET history
Alarm generated
ZSET start request
ZSET
request
R-ZRET
Step
JOG+
JOG-
DB001021
DB00101C
DB001024
DB00101D
IBC0150
DB001034
DB001019
IBC0150
DB001044
DB00101E
IBC0150
DB001054
IBC000F
IB00011
IB00012
DB001020
DB001000
IB00015
IB00016
DB001023
IB00013
IB00014
DB001030
IB00012
IB00011
DB001020
DB00101C
IB00017
IB00013
IB00014
DB001031
DB001000
IB00014
IB00013
DB001030
DB00101D
IB00017
IB00011
IB00012
DB001033
IB00015
IB00016
DB001033
IB00015
DB001041
DB001000
DB001040
DB001040
DB001019
IB00017
IB00011
IB0012
DB001043
IB00013
IB00014
IB00016
IB00016
DB001051
DB001000
DB001050
DB001050
DB00101E
IB00017
IB00011
IB00012
DB001053
DB001043
00000
(NOP)
IEND
FEED start request
PSH9200-962401
P00110
DWG. H01.01
Main program
2 0101
1 0103
1 0104
1 0107
1 0110
1 0114
1 0117
1 0119
1 0123
1 0128
1 0131
1 0133
1 0138
1 0139
1 0144
1 0147
1 0151
1 0152
1 0157
1 0161
1 0165
1 0166
Draw.
Date 1997.12.17
DWG. H01.01
Main program
PSH9200-962401 P00110
owco20
Servo parameter
Motion command start command
Feed (Fixed speed feed)
STEP (Fixed length feed)
ZERT (zero point return)
ZERT (zero point setting)
COMMENT.CROSS REF. ($,&,@=WRITE,/=DWG, -=ABOX, I=SFC,==SYMBOL,%=FBD,:=TBL).U.