3 motion monitoring parameter – Yaskawa MP920 User's Manual Design User Manual
Page 413
7 Parameters
7.2.3 Motion Monitoring Parameter
7-18
7.2.3
Motion Monitoring Parameter
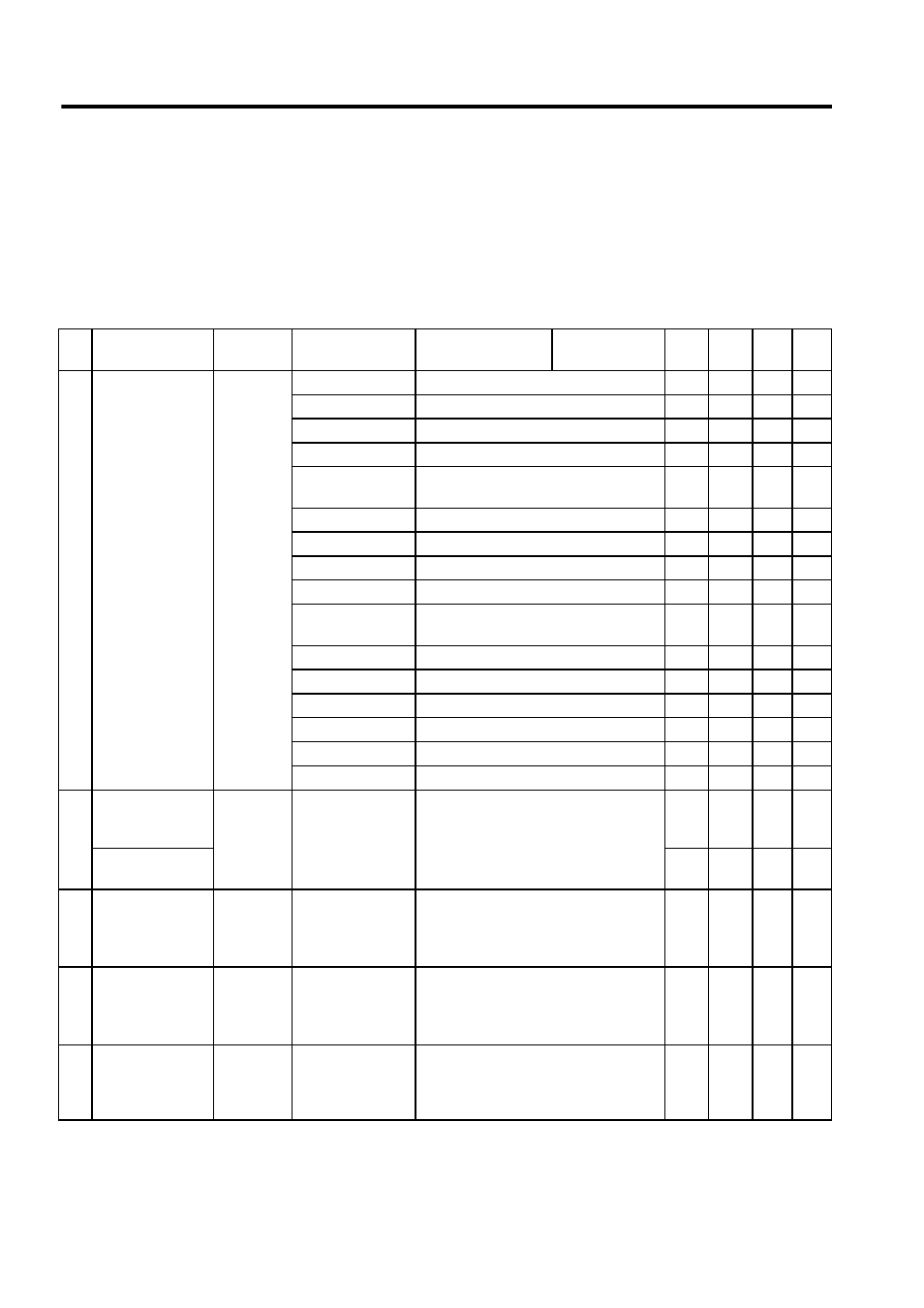
Motion monitoring parameters are parameters reported by SVA Modules. They are located
at the top of high-speed scans and are reported together. Use these parameters to control
applications and to debug user programs.
Table 7.4 Motion Monitoring Parameters
No
Name
Register
No.
Bit
(Setting Range)
Meaning
Remarks
SVA-
01A
SVA
-02A
SVB
-01
PO-
01
1
RUN Status
(RUNSTS)
IW 00
Bit 0: EOVER
Error counter over
9
9
Bit 1: PRMERR
Motion setting parameter setting error
9
9
9
9
Bit 2: FPRMERR
Motion fixed parameter setting error
9
9
9
9
Bit 3: Not used
Bit 4: PGER
Cumulative number of rotations receiving
error
9
9
Bit 5: Not used
Bit 6: Not used
Bit 7: SVCRDY
Motion controller RUN ready
9
9
9
9
Bit 8: SVCRUN
Motion controller running
9
9
9
9
Bit 9: DIRINV
Rotation direction when using absolute
encoder
9
9
Bit 10: ABCRDC
Absolute position read completed signal
9
9
Bit 11: DIINT
DI latch completed signal
9
9
Bit 12: FBPO
Feedback pulse 0
9
9
Bit 13: POSCOMP
Positioning completed signal
9
9
9
9
Bit 14: Not used
Bit 15: ZRNC
Zero point return completed
9
9
2
Servo Driver
Status
(SYSTS)
IW 01
Bits 0 to 15
The meaning of each bit depends on the
Module type. See the explanation on
monitoring parameters of each Module.
9
General-purpose
DI Monitor
9
9
9
3
Machine Coordi-
nate System Cal-
culated Position
(CPOS)
IL 02
−2
31
to 2
31
−1
1 = 1 pulse or 1 = 1 reference unit
1 = 1 pulse for pulse unit
Will be updated also when the machine is
locked.
9
9
9
9
5
Target Position
Difference Moni-
tor
(PTGDIF)
IL 04
−2
31
to 2
31
−1
1 = 1 pulse or 1 = 1 reference unit
1 = 1 pulse for pulse unit
9
9
9
7
Machine Coordi-
nate System
Latch Position
(LPOS)
IL 06
−2
31
to 2
31
−1
1 = 1 reference unit
(1 = 1 pulse for pulse unit)
9
9
9