Example of the zero point return operations – Yaskawa MP920 User's Manual Design User Manual
Page 179
4.4 Position Control Using Motion Commands
4-65
4
Example of the Zero Point Return Operations
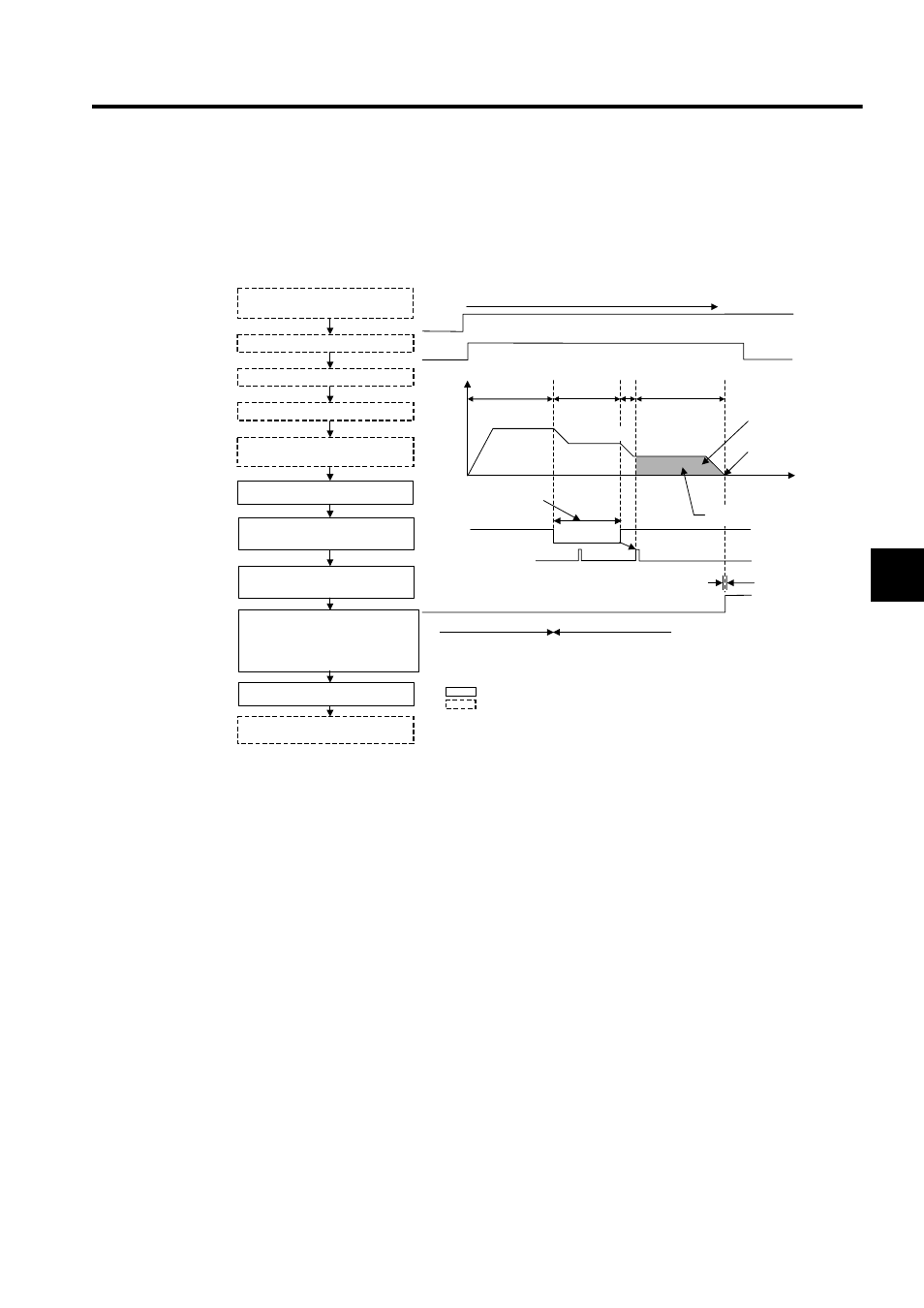
Use the following procedure to perform zero point return operations.
The following illustration shows an example of the DEC1 + C-phase pulse method.
1. Set the initial values for the motion fixed parameters and the motion setting parameters
according to the user’s machine.
2. Set the Position Control Mode (PCON) (bit 2 of OW00).
3. Set the motion setting parameter to be used with zero point return (ZRET).
4. Set Servo ON (RUN) to ON (bit 0 of OW01).
For a PO-01 Module, set Excitation ON (RUN) to ON.
5. Set zero point return (ZRET = 3) in the motion command code (OW20).
0
1.
2.
3.
4.
RUN
ZRET
ZRNC
2. Set the position control mode (PCON).
3. Set the motion setting parameters.
4. Set Servo ON (RUN) to ON.
Speed
reference
Direction specified as the zero point return direction (OBC0009)
Zero point return final
travel distance
Limit switch width
≥ 2 × Ts
(Ts: High-speed scan
setting value)*2
Area A
Area B
Rapid traverse speed
Approach speed
Creep speed
Zero point return position
Dog
(Deceleration limit switch)
Zero point signal
(C-phase pulse)
Zero point return final
travel distance
Reverse direction
← → Forward direction
Zero point
Time
: System execution
: User setting
Positioning completed range
1. Set the motion fixed parameters.
Set the motion setting parameter initial
values.
5. Execute the zero point return (ZRET)
motion command.
6. The axis travels at rapid traverse
speed in the specified direction.
7. The axis decelerates to approach
speed at the trailing edge of the
deceleration limit switch signal.
8. The axis decelerates to creep speed
at the leading edge of the deceleration
limit switch signal.
9. When the deceleration limit switch signal
goes high, the axis stops after traveling only
the zero point return final travel distance
from the initial zero point signal, and that
position will be the machine coordinate
system zero point.
10. The zero point return completed
status (ZRNC) turns ON.
11. Execute the motion command
(NOP (= 0)).