Etc_co_sdoread4, L-force | plc designer – Lenze PLC Designer PLC Designer (R3-1) User Manual
Page 915
L-force | PLC Designer
Device Editors
DMS 4.1 EN 03/2011 TD29
913
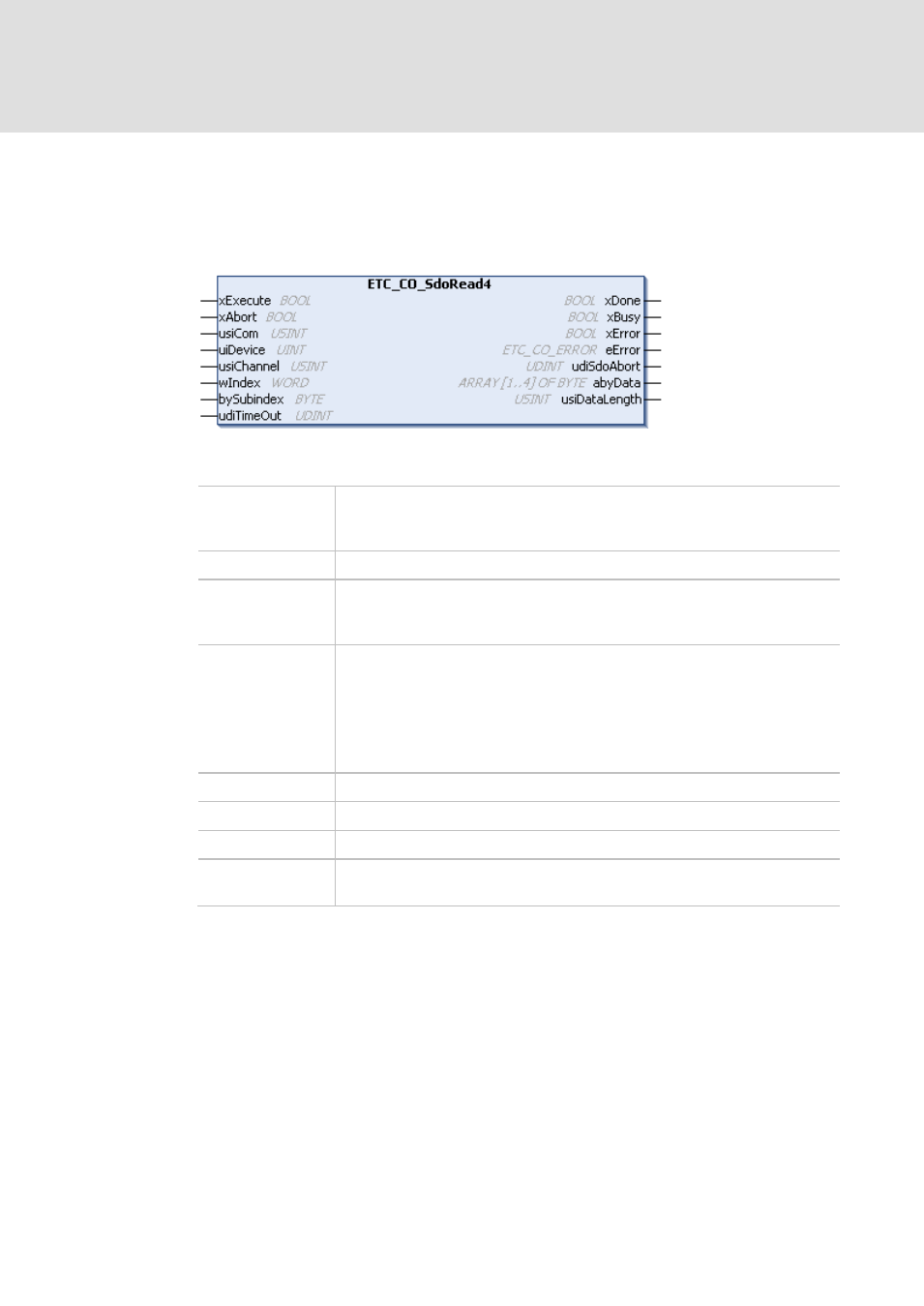
ETC_CO_SdoRead4
This function block, which is provided with the library IODrvEtherCAT.library, serves to
read EtherCAT slave parameters. In contrast to ETC_CO_SdoRead only parameters not
longer than 4 Bytes will be supported. The parameter to be read is specified by Index
and Subindex as used in the object dictionary.
Input parameters:
xExecute
On a rising edge at this input the reading of the slave parameter will be started. In
order to get the internal channel deallocated, the instance must be called at least
once by "xExecute:= FALSE".
xAbort
If this input is TRUE, the current read process will be aborted.
usiCom
Number of the EtherCAT Masters: If only one EtherCAT Master is used, usiCom
always is "1". In case of multiple masters use "1" for the first, "2" for the second,
etc.
uiDevice
Physical address of the slave.
If the autoconfiguration mode in the master is deactivated , an own address can
be set in the slave. That arbitrarily chosen address must be entered here.
If the autoconfiguration mode is activated, the first slave will get address "1001".
The current address of a slave always can be checked in the Slave configuration
dialog in field „EtherCAT address“.
usiChannel
Reserved for future extensions. Currently not used.
wIndex
Index of the parameter in the object dictionary.
bySubIndex
Subindex of the parameter in the object dictionary.
udiTimeout
Here you can set a timeout in milliseconds. If the reading of the parameter has
not been executed within this time, an error message will be generated.