L-force | plc designer – Lenze PLC Designer PLC Designer (R3-1) User Manual
Page 576
L-force | PLC Designer
General Editors
574
DMS 4.1 EN 03/2011 TD29
Module MC_CAMTableSelect:
• Periodic
This parameter determines whether a CAM will be processed again after the end
position of the master has been reached. This will be the case of the parameter set
to TRUE.
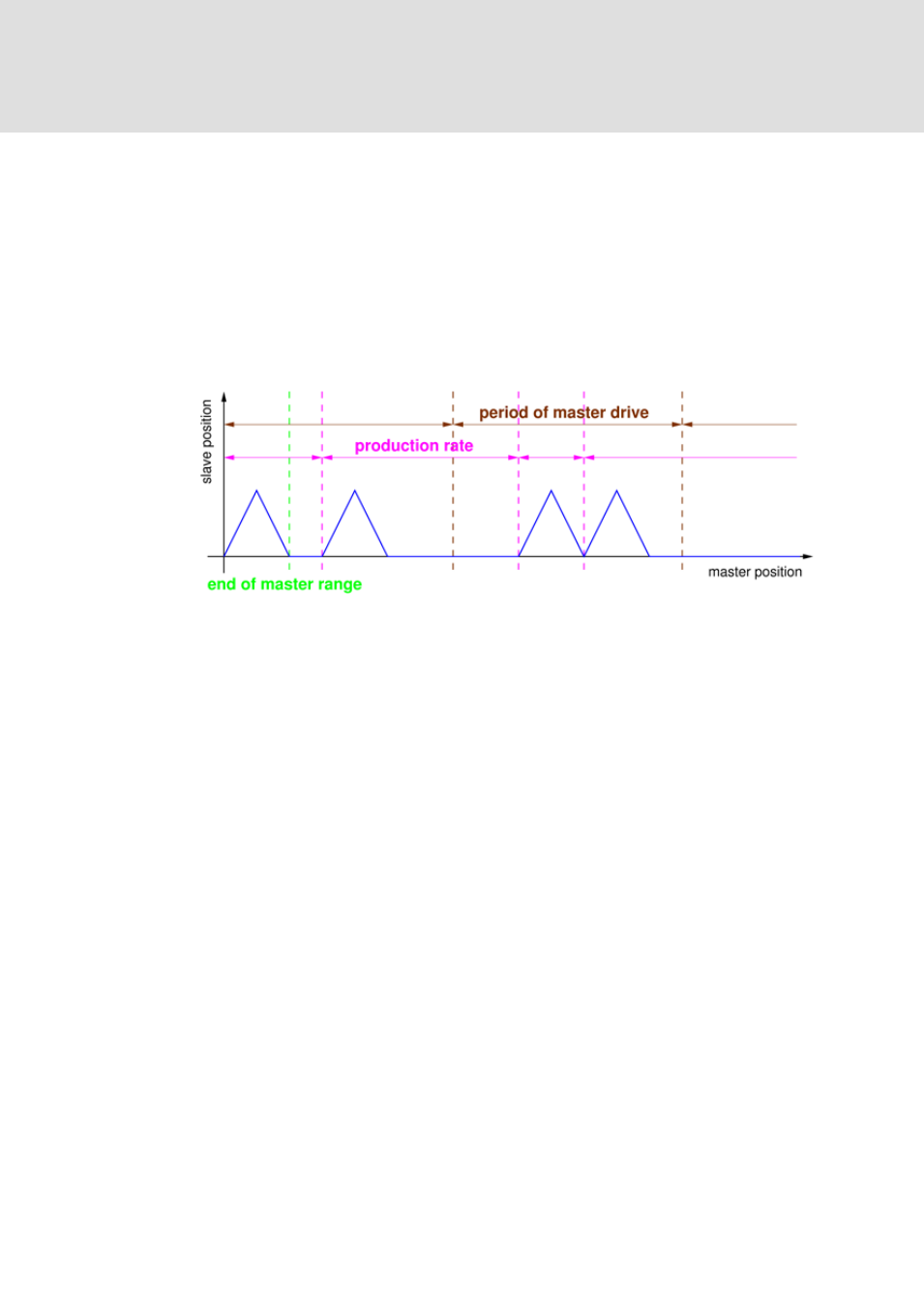
Have a look to the following picture for a clear differentiation between the
occurring periods: As example you may think of a band-conveyor transporting
identical objects. The master values range from 0 to the length of the objects.
Within this range an object is approached and left behind again by a tool (for
example for stamping a mark) whose position is driven by the slave (blue graph).
Of course, the master range of a CAM (that is the range of defined master values) is
not equatable with the period of the master drive (that is one turn-over of the band
in the example). Therefore, the assignment 'SlavePosition = CAM( MasterPosition )',
that is the definition of the slave position in dependence of the master position via
the CAM, is valid only in the first cycle of the CAM.
A new cycle of the CAM driving the tool has to be started with the arrival of a new
object. As there is a distance between the objects on the band (and this distance
even may differ), the production rate, that is the time slice between successive
starts of the CAM, is not identical to the master range of a CAM.
In case of the parameter set to FALSE, as soon as the end position of the master is
reached, the output variable EndOfProfile of module CamIn will be set to TRUE and
the slave will be fixed up to its actual position. Remark that the CAM action is not
terminated by quitting the defined master range. When the master reenters the
valid range, the slave will still be controlled according to the CAM.
• MasterAbsolute
If this input is TRUE, the CAM will be started at the current master position. This
point may also be situated in the middle section of the CAM. However, if the point
is outside of the range specified by the CAM, an error message will be generated.
If this input is FALSE, the CAM will be shifted to the current position, that is
afterwards the zero-point of the CAM master will be located at the current master
position. A CAM, whose master range does not include "0", cannot be used within
this mode, an error message ("...master leaving specified range...") will be
generated.