1 encoder evaluation method, Encoder evaluation method ( 161), 5motor control (mctrl) – Lenze 8400 motec User Manual
Page 161
Lenze · 8400 motec · Reference manual · DMS 4.1 EN · 08/2013 · TD05
161
5
Motor control (MCTRL)
5.11
Encoder/feedback system
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.11.1
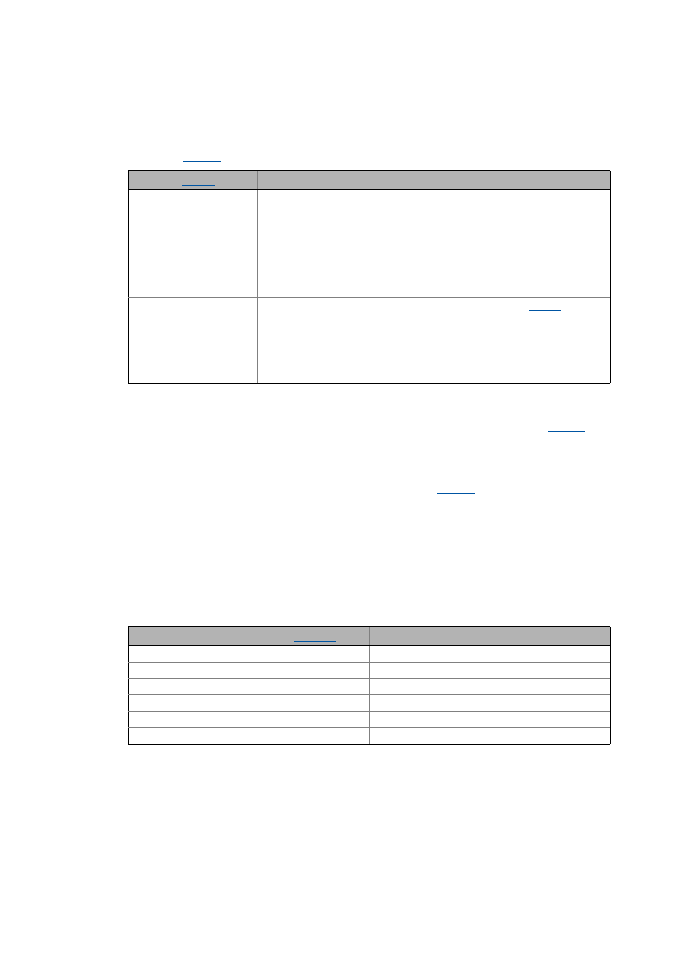
Encoder evaluation method
Depending on the encoder used, the following table specifies which evaluation method should be
:
Tip!
We recommend the use of the preset procedure for low-resolution encoders (
= 1).
Low speeds during evaluation procedure for low-resolution encoders
When the evaluation procedure for low-resolution encoders (
= 1) is used, the minimally
measurable speed depends on the number of increments of the encoder.
The quantisation error
• is independent of the encoder increment,
• exclusively depends on the encoder quality (encoder errors).
• amounts to at least 0.5 rpm.
Internal arithmetic operations automatically maintain the minimally required value of the scanning
time in order to achieve maximum dynamics.
Selection in
Encoder evaluation method
1: Low-resolution encoder
(Lenze setting)
High-precision procedure for low-resolution encoders (<=128 increments)
• Exact method for speed measurement with automatic scanning time setting
(0.5 … 500 ms) for low-resolution encoders in the range of 4 …. 128 increments.
• Evaluation with automatic scanning time minimisation for an optimum dynamic
performance.
• Method is also suited for encoders with poor signal quality, e.g. for encoders with
high error rate in scanning ratio and phase offset.
• This method requires an equidistant period length per encoder increment.
• Wiring according to EMC (e.g. motor and encoder cable shielding) is required!
3: Edge-counting procedure
Simple edge counting procedure with adjustable scanning time (
• Speed measurement by means of the edges of tracks A and B measured per
scanning interval.
• Integrated correction algorithm for EMC interference.
• Limited suitability for systems with unshielded encoder and/or motor cable.
• Limited suitability for encoders with poor signal quality, i.e. high error rate in
scanning ratio and phase offset.
Number of encoder increments
Minimum speed [rpm]
8
16
16
8
32
4
64
2
128
1
256
0.5