5motor control (mctrl) – Lenze 8400 motec User Manual
Page 128
5
Motor control (MCTRL)
5.9
Sensorless control for synchronous motors (SLPSM)
128
Lenze · 8400 motec · Reference manual · DMS 4.1 EN · 08/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The motor model-based speed monitoring requires a rotating machine. Thus, the operational
performance of the sensorless control for synchronous motors is divided into two categories:
1. Open-loop controlled operation (|n
setpoint
| < n
C00996
)
• In the range of low speeds, the speed of a synchronous motor is not possible. Thus, only an
adjustable and constant current is injected that enables an acceleration.
2. Closed-loop controlled operation (|n
setpoint
| > n
C00996
)
• In this range, the rotor flux position and the speed are reconstructed via an observer. The
control is carried out field-oriented. Only the current is injected that is needed for the
required torque.
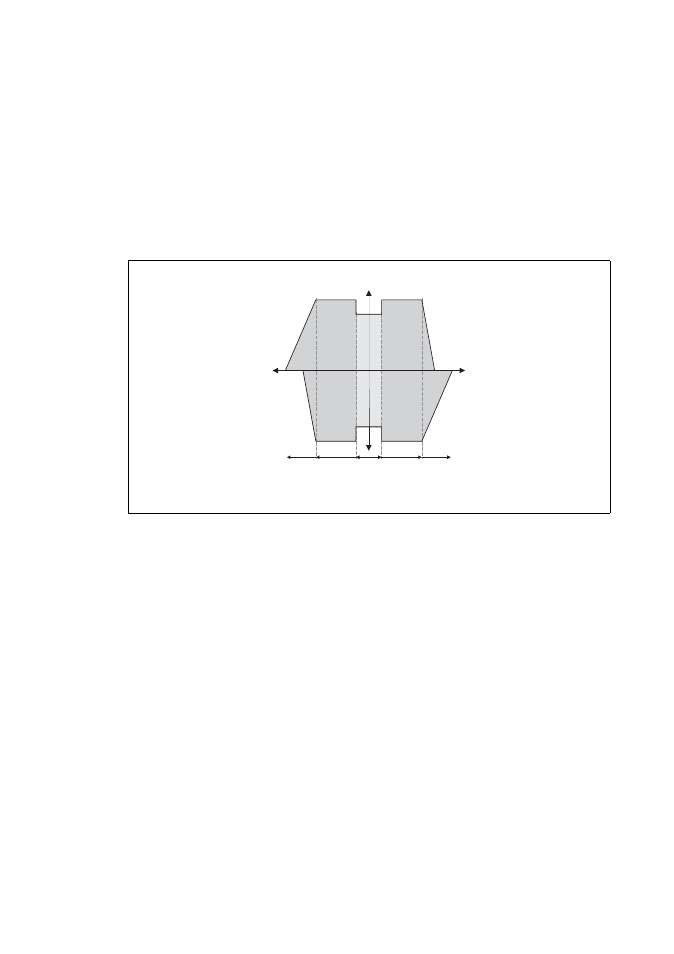
[5-5]
Operating ranges of the sensorless control for synchronous motors
The sensorless control for synchronous motors has similar advantages for the closed-loop
controlled operating range and the servo control (SC) for synchronous motors. Compared to
asynchronous motors, there are the following advantages:
• Higher power density of the motor
• Higher efficiency
• Limitation of the maximum torque in motor mode and generator mode in closed-loop
operating range
• Implementation of simple positioning
Operation in motor mode (CW rotation), Operation in generator mode (CCW rotation),
Operation in motor mode (CCW rotation), Operation in generator mode (CW rotation)
Field weakening
Closed-loop controlled operation
Open-loop controlled operation
0
1
2
3
M
n