Rockwell Automation 8520 9/Series CNC Integration Maintenance Manual Documentation Set User Manual
Page 700
Integrating a Split Axis with Deskew
Section 14B
14B-6
8.
Loosen the encoders for both servos. In most cases, you can loosen
the encoder casing from its mounting without disengaging the
encoder shaft. This way you can rotate the encoder and change its
position reading without moving the axis.
Important: On all digital servo motors and some analog servo systems,
rotation of the encoder relative to the motor is not possible. The encoder is
mounted relative to the motor shaft at a specific location and cannot be
moved. In these cases it is necessary to disconnect the servo drive linkage
and rotate the motor shaft to align encoder markers.
9.
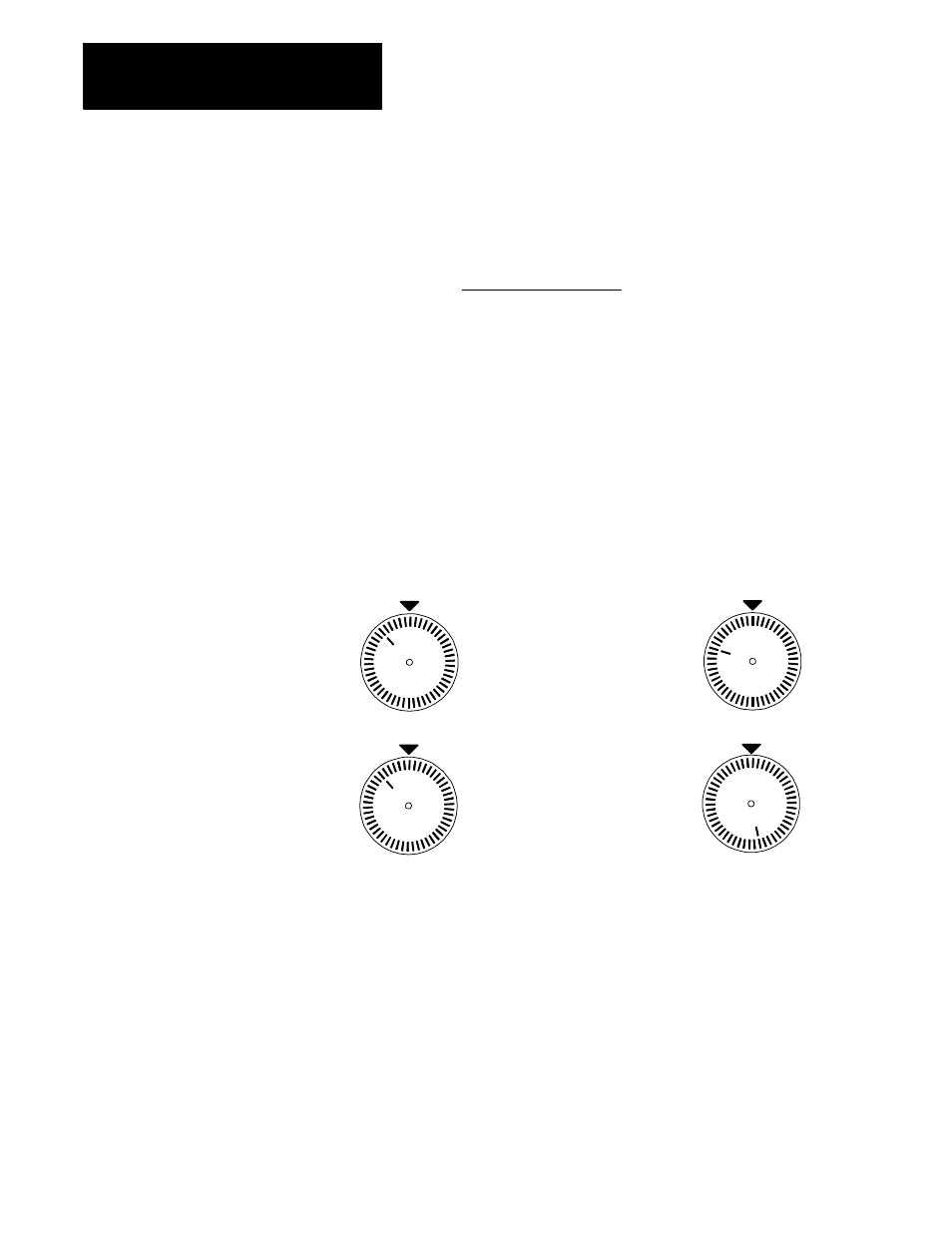
Align the two servos’encoder markers. Align the encoder markers
by rotating the encoder casing until the DISTANCE TO MARKER
value on the display for each servo is as close to the same value as
possible. Refer to Figure 14B.3.
Figure 14B.3
Aligning Master and Slave Encoder Markers
CORRECT
INCORRECT
SLAVE
MASTER
Master and slave
encoder markers are
aligned within a few
counts of eachother
Master and slave
encoder markers are not
aligned, resulting in a
significantly different
distance to marker between
the servos when homing.
SLAVE
MASTER
10. Tighten the encoders for both servos. This will assure that both
servos are approximately the same distance from their markers when
there is minimal axis skew.
11. Loosen the clamps or remove the weight you used to secure the axis
in step 6.
12. Turn power to the control off and then back on again. When power is
turned back on the servos will assume that they are in position and
will hold the axis at minimal skew, this time with encoder markers
aligned.