Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 511
Chapter 40 Linear and Arc Interpolation Motion Control API | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012
40-5
Description
Mode Parameter Settings
Example
U16 CardNo=0, *NodeID=1, *SlotID=0;
I32 pos1_x=0, I32 pos1_y=10000, I32 pos1_z=10000;
I32 pos2_x=10000, I32 pos2_y=10000, I32 pos2_z=10000;
U16 mode=1; param=3000;
I32 StrVel=100, MaxVel=5000;
F64 Tacc=0.1, Tdec=0.1;
U16 m_curve=1;
U16 m_r_a=0;
/*Set as multi-axis motion control using absolute coordinates with T-curve velocity
cross-section. */
I16 status = _DMC_01_start_rline_xyz (CardNo, &NodeID, &SlotID, pos1_x, pos1_y, pos1_z,
pos2_x, pos2_y, pos2_z, mode, param, StrVel, MaxVel, Tacc, Tdec, m_curve,
m_r_a);
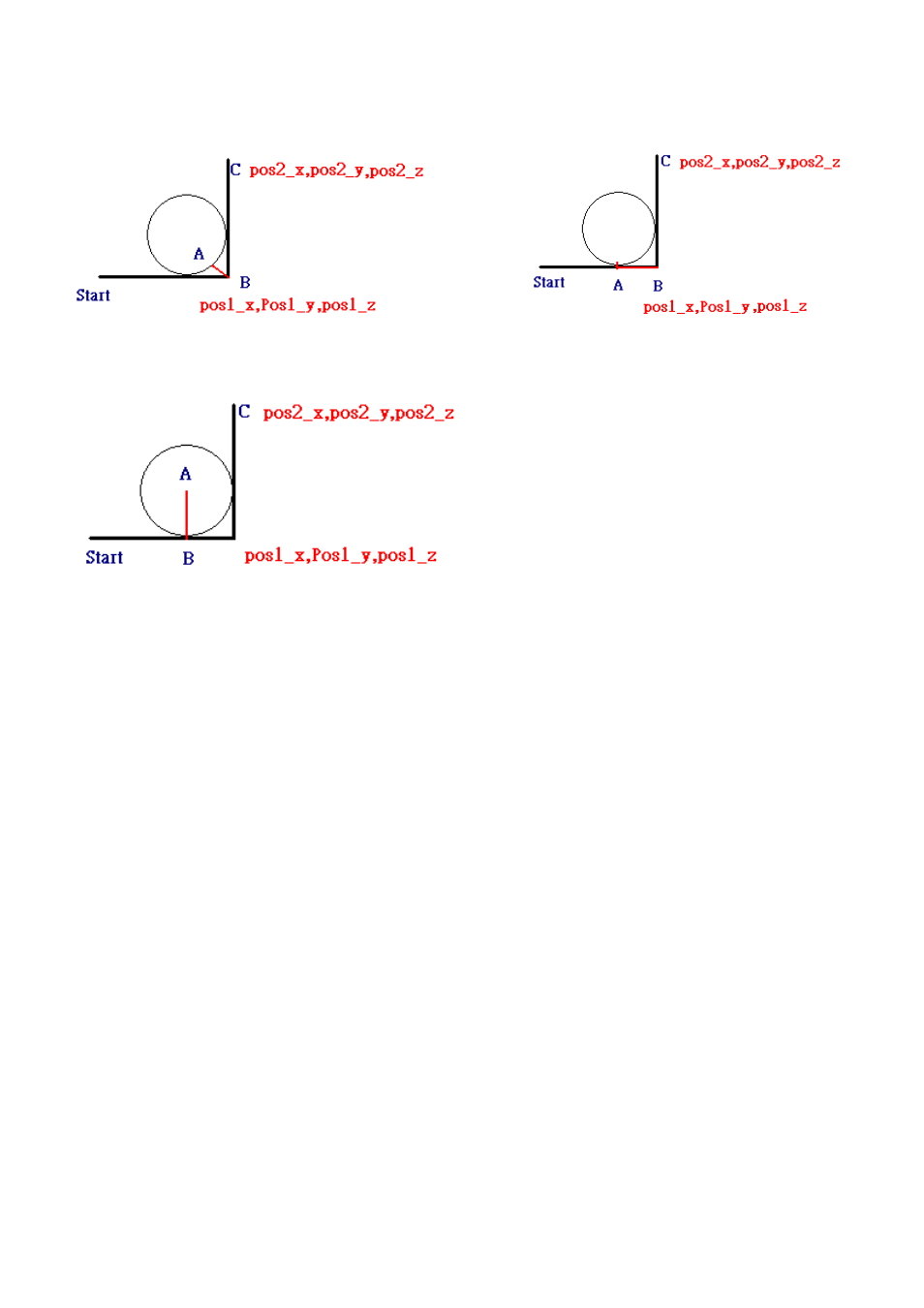
Figure 40.4 Mode = 0 Perpendicular
distance from arc to right angle (AB)
Figure 40.5 Mode = 1 Perpendicular
distance from start of arc to right angle
Figure 40.6 Mode = 2 Arc radius (AB)