Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 510
Chapter 40 Linear and Arc Interpolation Motion Control API | PCI-DMC-A01 / PCI-DMC-B01
40-4
Revised March, 2012
40.2 _DMC_01_start_rline_xyz
FORMAT
I16 PASCAL _DMC_01_start_rline_xyz (U16 CardNo, U16* NodeID, U16* SlotID,
I32 pos1_x, I32 pos1_y, I32pos1_z, I32 pos2_x, I32 pos2_y, pos2_z, U16 mode,
F64 param, I32 StrVel, I32 MaxVel, F64 Tacc, F64 Tdec,U16 m_curve, U16 m_r_a)
Purpose
3-axis linear, arc R-angle interpolation motion control
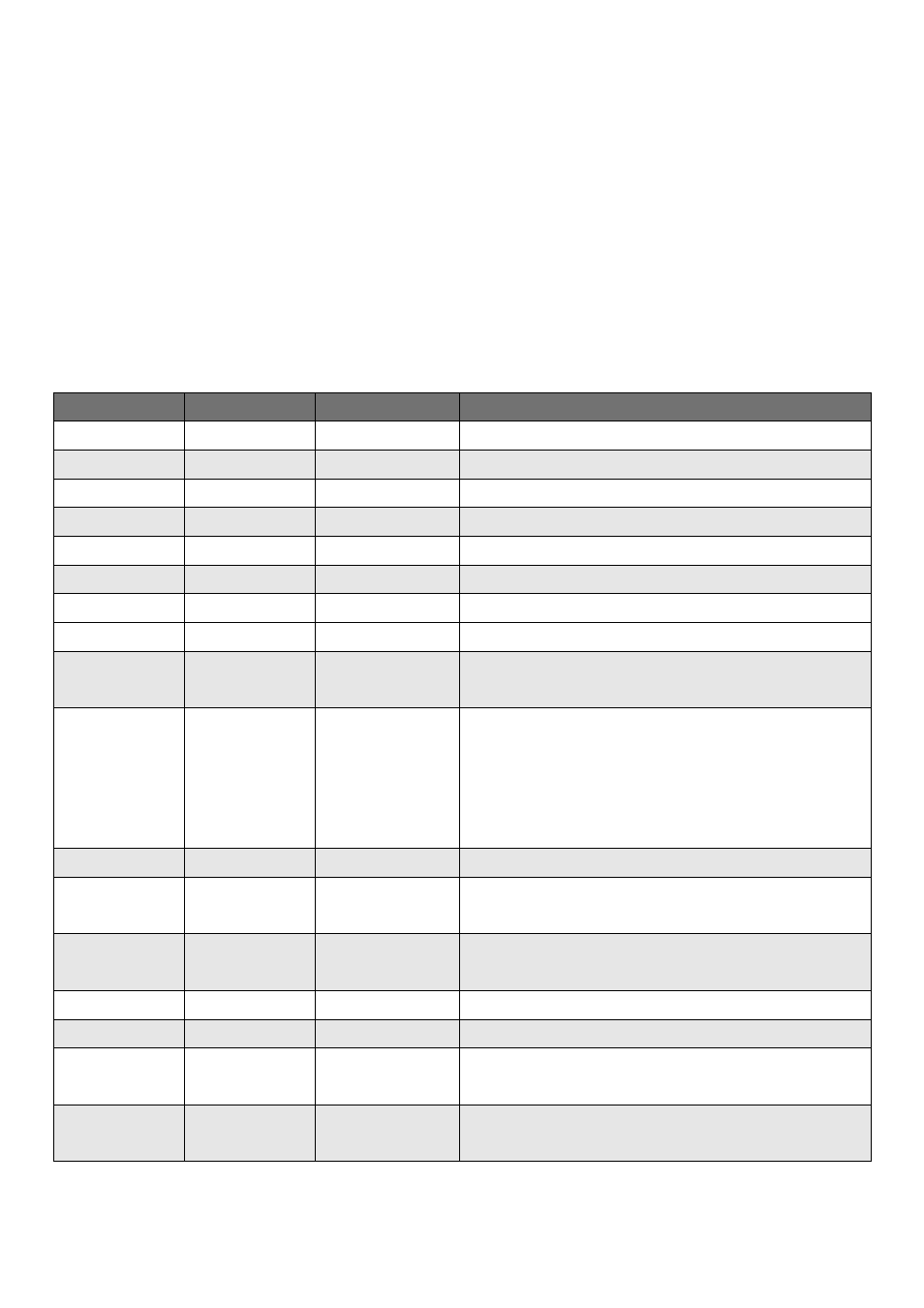
Parameters
Name
Data Type
Unit
Description
CardNo U16
Number
Unit
CardNo is between 0~15
NodeID
U16*
Number Unit
Node ID
SlotID
U16*
Number Unit
Slot ID
Pos1_x
I32
Number Unit
X-coordinate of first position
Pos1_y I32
Number
Unit
Y-coordinate of first position
Pos1_z
I32
Number Unit
Z-coordinate of first position
Pos2_x I32
Number
Unit
X-coordinate of second position
Pos2_y I32
Number
Unit
Y-coordinate of second position
Pos2_z
I32
Pulses per
second
Z-coordinate of second position
Mode U16
Selection
0: Perpendicular distance from arc to right angle
(AB)
1: Perpendicular distance from start of arc to
right angle (AB)
2: Arc radius (AB)
Param
F64
Number Unit
Relative mode distance
StrVel I32
Pulses per
second
Starting velocity
MaxVel
I32
Pulses per
second
Maximum velocity
Tacc F64
Second
Specified
acceleration
time
Tdec
F64
Second
Specified deceleration time
m_curve U16
Selection
1: T-curve
2: S-curve
m_r_a
U16
Selection
0: Relative motion displacement
1: Absolute motion displacement