Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 327
Chapter 20 2-Axis Arc Interpolation Motion Control API | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012
20-39
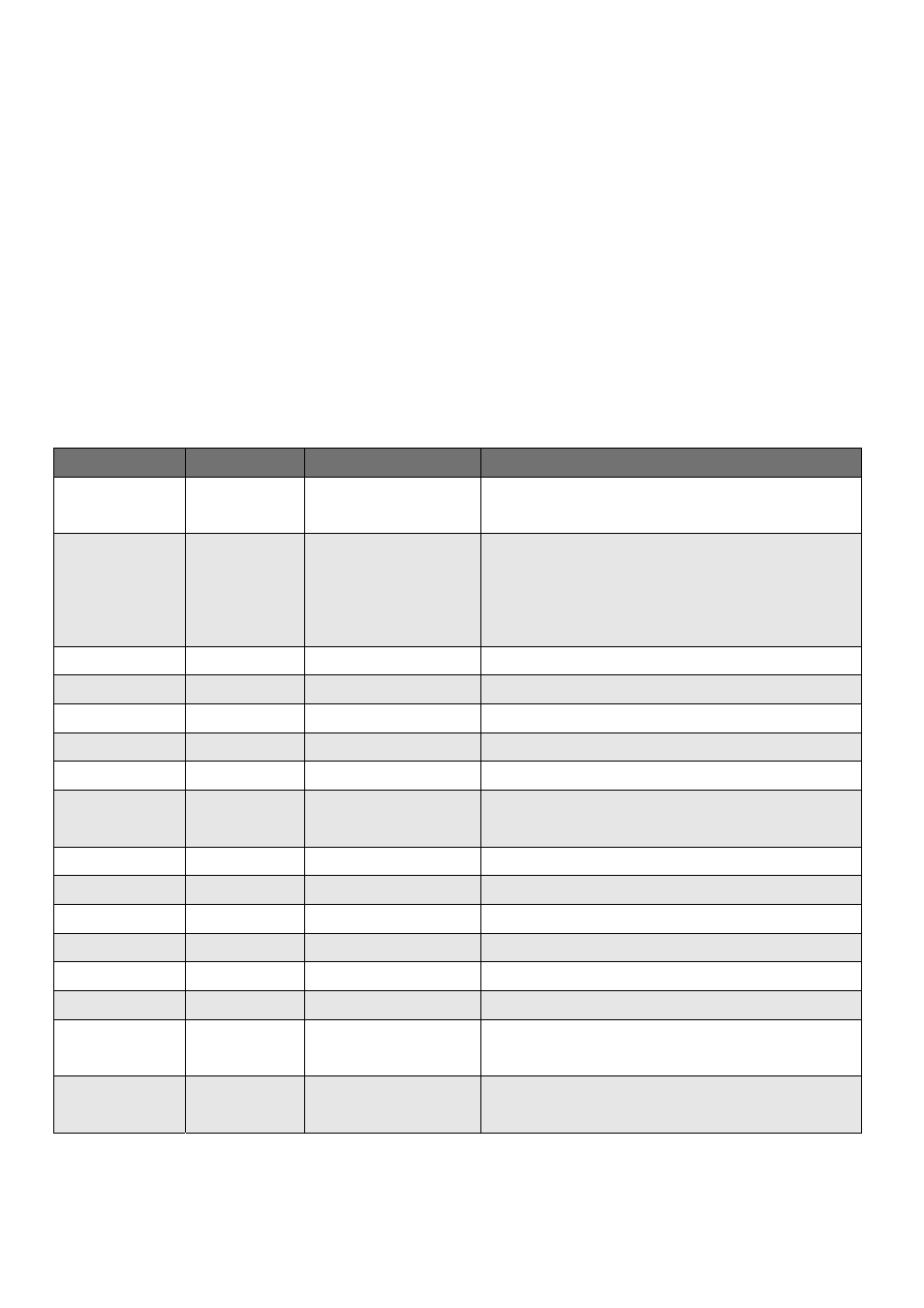
20.19 _DMC_01_start_v3_spiral2_xy
FORMAT
I16 PASCAL _DMC_01_start_v3_spiral2_xy (U16 CardNo, U16* NodeID, U16* SlotID,
I32 center_x, I32 center_y, I32 end_x, I32 end_y, U16 dir, U16 circlenum, I32 StrVel,
32 ConstVel, I32 EndVel, F64 TPhase1, F64 TPhase2, U16 m_curve,U16 m_r_a)
Purpose
2-axis spiral motion with EndVel added (Known conditions: center coordinates for X and Y
axes, endpoint coordinates for X and Y axes).
※Values of StrVel and EndVel can be greater than MaxVel.
Parameters
Name
Data Type
Unit
Description
CardNo U16
Number
Unit
Node ID of card used for motion
displacement along X-axis and Y-axis
NodeID
U16*
Number Unit
Holds Node ID sets used for carrying out
spiral motion
NodeID[0] holds 1st set of Node ID
NodeID[1] holds 2nd set of Node ID
SlotID
U16*
Number Unit
Slot ID
center_X
I32
Number of pulses Center X-coordinate on specified axis
center_Y I32
Number
of
pulses
Center Y-coordinate on specified axis
end_X
I32
Number of pulses Endpoint X-coordinate on specified axis
end_Y I32
Number
of
pulses
Endpoint
Y-coordinate on specified axis
dir
U16
Selection
Direction of spiral arc motion. Clockwise: 1 ;
Counterclockwise: 0
circlenum U16 Number
Number
of circles in spiral motion
StrVel
I32
Pulses per second Starting velocity parameter
ConstVel
I32
Pulses per second Constant velocity
EndVel
I32
Pulses per second End velocity
TPhase1 F64 Second
Time
from StartVel to ConstVel
TPhase2
F64
Second
Time from ConstVel to EndVel
m_curve U16 Selection
1: T-curve
2: S-curve
m_r_a
U16
Selection
0: Relative motion displacement
1: Absolute motion displacement