Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 158
Chapter 4 Control API | PCI-DMC-A01 / PCI-DMC-B01
4-4
Revised March, 2012
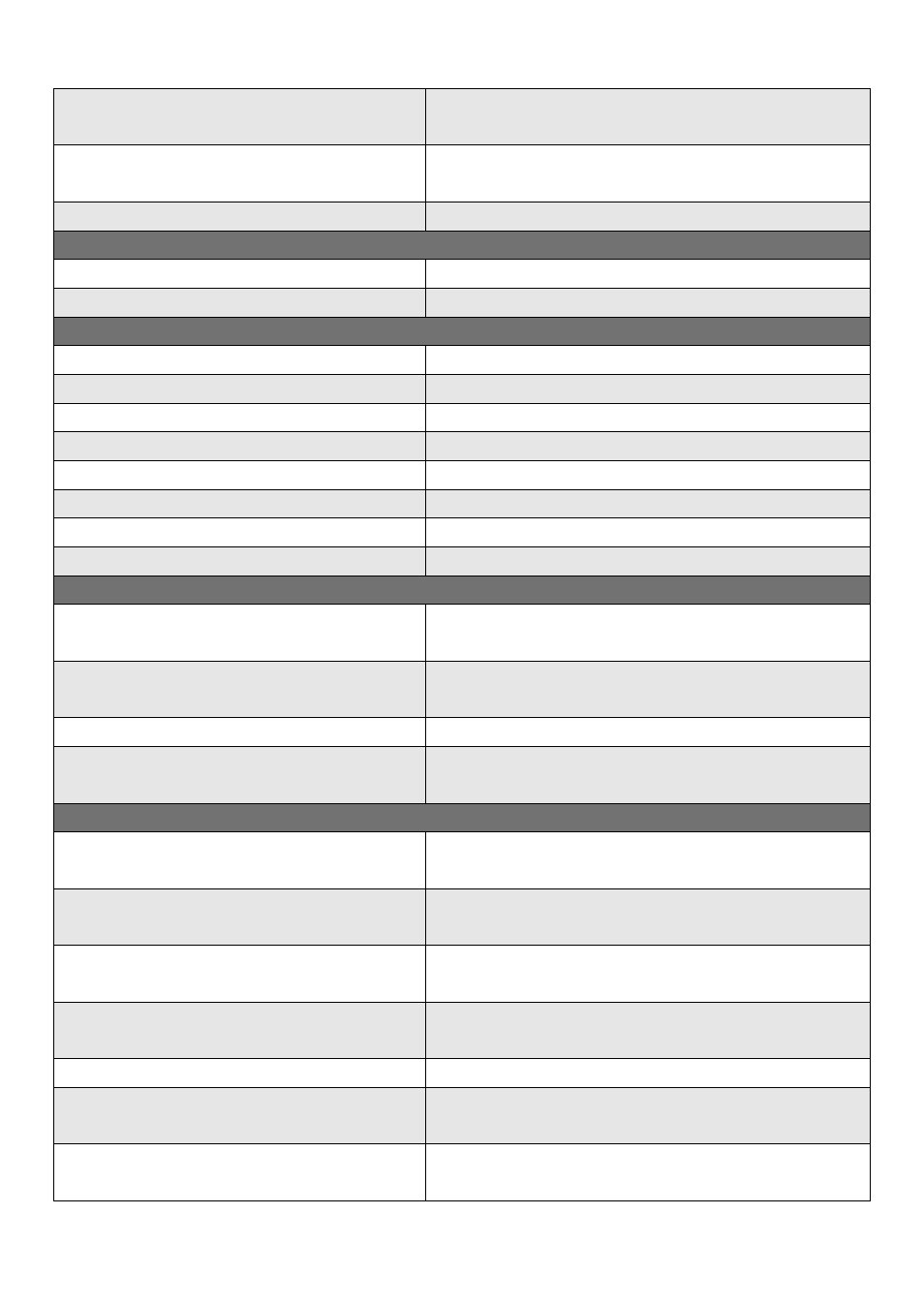
_DMC_01_sd_stop
All motion commands in buffer will execute slow
down stop based on deceleration time
_DMC_01_sd_abort
Current motion command will execute deceleration
time stop
_DMC_01_set_sd_mode
Set Sd_stop mode
Motion Status API
_DMC_01_motion_done Return
current
motion stage of the Master Card
_DMC_01_motion_status
Return current motion status of the Master Card
Motion Counter Value API
_DMC_01_get_command
Get Command counter value
_DMC_01_set_command
Set new Command counter value
_DMC_01_get_position Get
current position counter value
_DMC_01_set_position
Set new position counter value
_DMC_01_get_target_pos
Get current position's position value
_DMC_01_get_torque
Get and return the current torque counter value
_DMC_01_get_current_speed
Get motion speed
_DMC_01_get_current_speed_rpm
Get current RPM multiplied by 10
Software Limit API
_DMC_01_set_soft_limit Set
reference
values for software positive/negative
limits
_DMC_01_enable_soft_limit
Enable/disable software limit and stop method after
contact with limit
_DMC_01_disable_soft_limit
Disable software limit
_DMC_01_get_soft_limit_status
Get status of software positive/negative limit during
motion
1-Axis Motion Control API
_DMC_01_start_tr_move Motion displacement using relative coordinates with
T-curve velocity cross-section
_DMC_01_start_sr_move
Motion displacement using relative coordinates with
S-curve velocity cross-section
_DMC_01_start_ta_move Motion
displacement using absolute coordinates
with T-curve velocity cross-section
_DMC_01_start_sa_move
Motion displacement using absolute coordinates
with S-curve velocity cross-section
_DMC_01_p_change Replace
current
position with new position value
_DMC_01_v_change
Replace current motion velocity with new velocity
value
_DMC_01_start_tr_move_2seg
2nd motion displacement using relative coordinates
with T-curve velocity cross-section