Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 160
Chapter 4 Control API | PCI-DMC-A01 / PCI-DMC-B01
4-6
Revised March, 2012
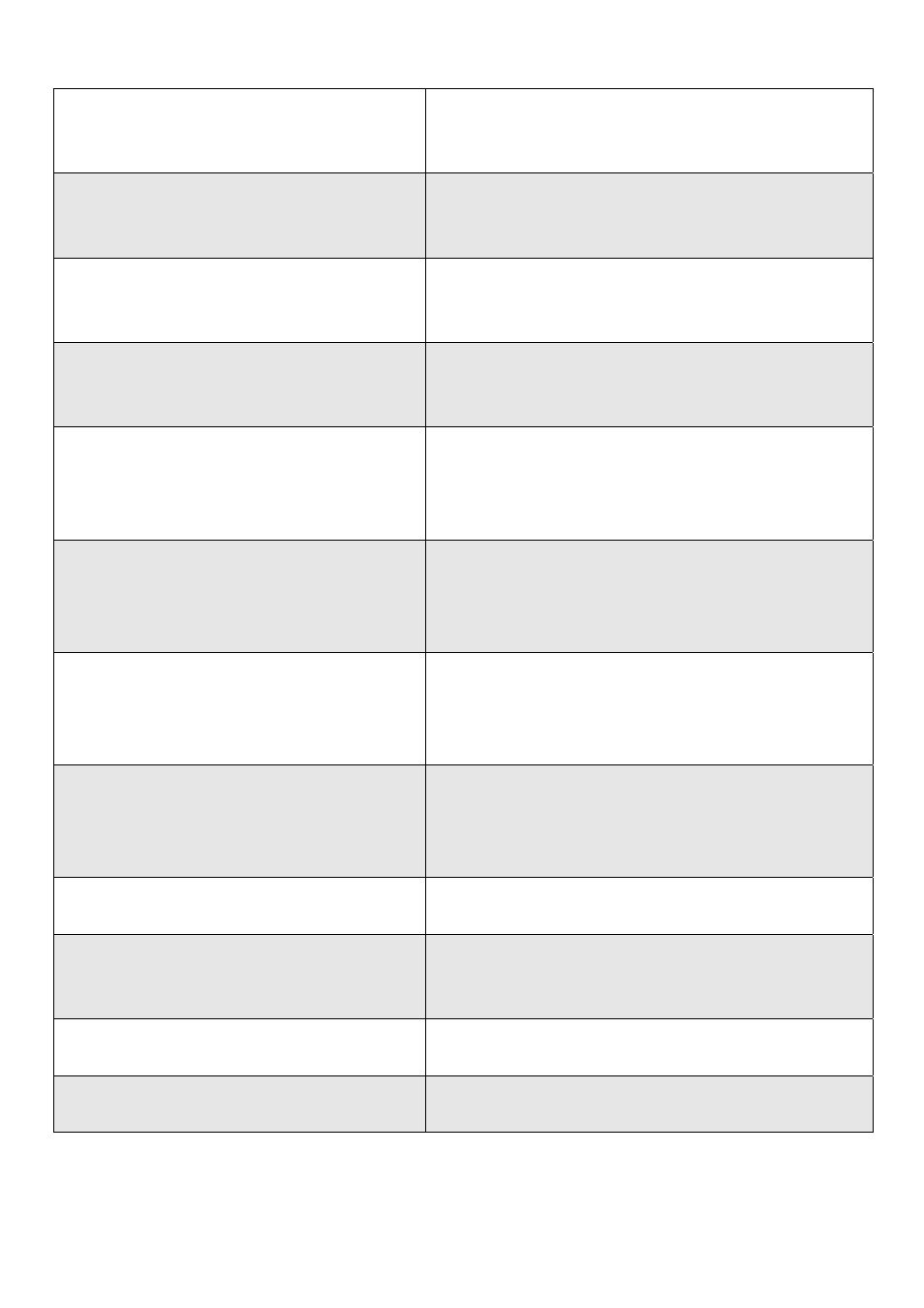
_DMC_01_start_tr_arc2_xy
2-axis arc interpolation motion using relative
coordinates with T-curve velocity cross-section
(Known conditions: Endpoint coordinates, angle)
_DMC_01_start_sr_arc2_xy
2-axis arc interpolation motion using relative
coordinates with S-curve velocity cross-section
(Known conditions: Endpoint coordinates, angle)
_DMC_01_start_ta_arc2_xy 2-axis
arc
interpolation motion using absolute
coordinates with T-curve velocity cross-section
(Known conditions: Endpoint coordinates, angle)
_DMC_01_start_sa_arc2_xy
2-axis arc interpolation motion using absolute
coordinates with S-curve velocity cross-section
(Known conditions: Endpoint coordinates, angle)
_DMC_01_start_tr_arc3_xy
2-axis arc interpolation motion using relative
coordinates with T-curve velocity cross-section
(Known conditions: Center point coordinates,
endpoint coordinates)
_DMC_01_start_sr_arc3_xy
2-axis arc interpolation motion using relative
coordinates with S-curve velocity cross-section
(Known conditions: Center point coordinates,
endpoint coordinates)
_DMC_01_start_ta_arc3_xy 2-axis
arc
interpolation motion using absolute
coordinates with T-curve velocity cross-section
(Known conditions: Center point coordinates,
endpoint coordinates)
_DMC_01_start_sa_arc3_xy
2-axis arc interpolation motion using absolute
coordinates with S-curve velocity cross-section
(Known conditions: Center point coordinates,
endpoint coordinates)
_DMC_01_start_spiral_xy
2-axis spiral motion (Known conditions: Center
coordinates for X and Y axes)
_DMC_01_start_spiral2_xy
2-axis spiral motion (Known conditions: Center
coordinates for X and Y axes, endpoint coordinates
for X and Y axes)
_DMC_01_start_v3_arc_xy 2-axis
arc
interpolation motion with EndVel added
(Known conditions: Center point coordinates, angle)
_DMC_01_start_v3_arc2_xy
2-axis arc interpolation motion with EndVel added
(Known conditions: Endpoint coordinates, angle)