Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 396
Chapter 28 4-Channel Pulse Interface (Mode 1) Motion Control API | PCI-DMC-A01 / PCI-DMC-B01
28-18
Revised March, 2012
28.9 _DMC_01_rm_04pi_md1_start_heli
FORMAT
I16 PASCAL _DMC_01_rm_04pi_md1_start_heli(U16 CardNo, U16 NodeID,U16* SlotID,
I32* Center,I32 Depth, I32 Pitch, I16 dir, I32 StrVel, I32 MaxVel, F64 Tacc, F64 Tdec,
U16 m_curve,U16 m_r_a)
Purpose
Performs 3-axis spiral interpolation motion control under RM04PI Mode 1.
※
For motion description, please see Chapter 22 “3-Axis Spiral Interpolation Motion Control
API”.
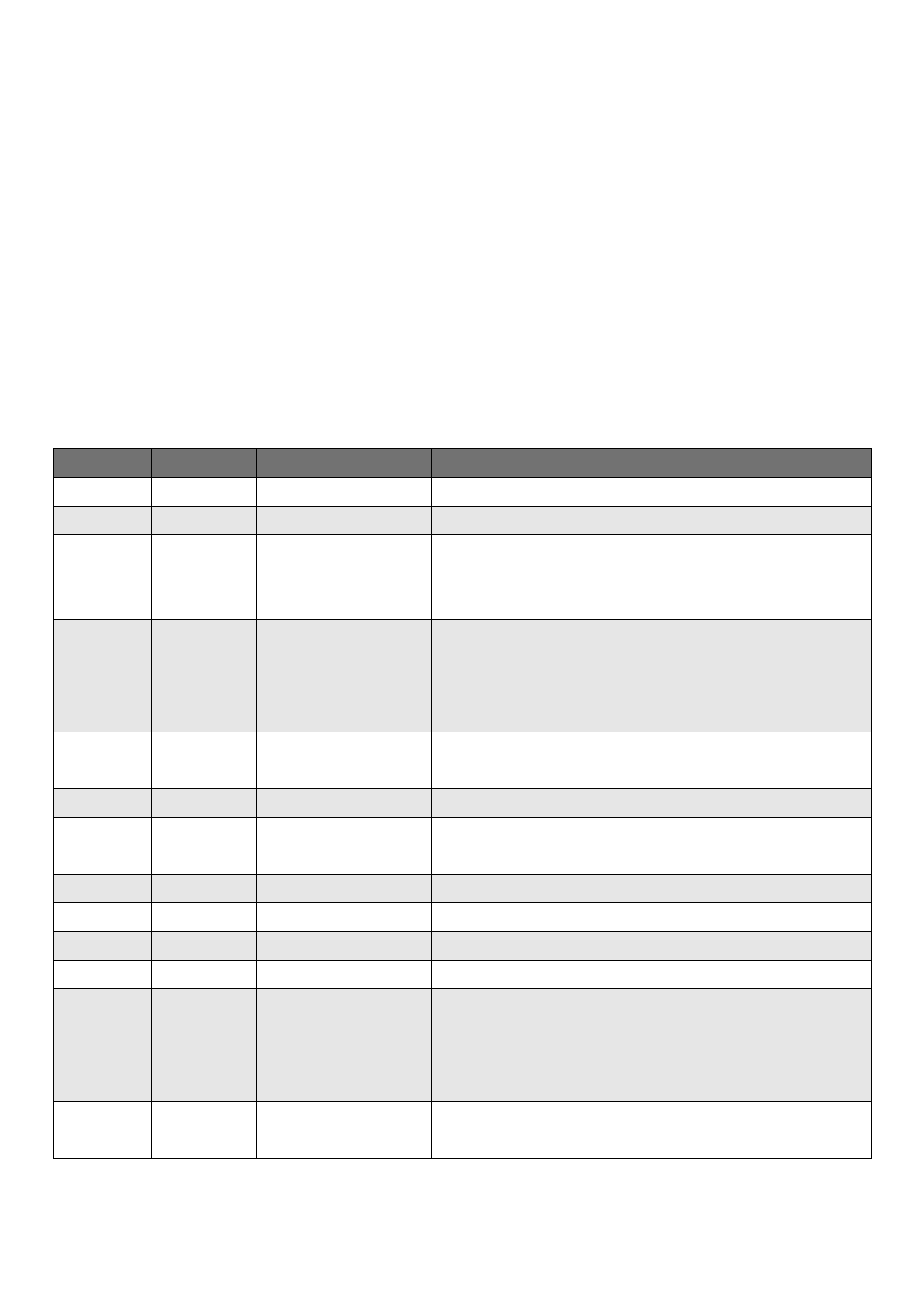
Parameters
Name
Data Type
Unit
Description
CardNo U16 Number
Unit
CardNo is between 0~15
NodeID
U16
Number Unit
Node ID
SlotID U16* Number
Unit
SlotID[0] holds first set of Slot ID
SlotID[1] holds second set of Slot ID
SlotID[2] holds third set of Slot ID
Center
I32*
Number of pulses
Center[0] holds first set of center point coordinates
Center[1] holds second set of center point
coordinates
Center[2] holds third set of center point coordinates
Depth I32
Number
of
pulses
Relative depth to position on specified axis (height
in direction of Z)
Pitch
I32
Number of pulses Relative height between two spirals
dir I16
Selection
Direction of spiral arc motion. Clockwise: 1;
Counterclockwise: 0
StrVel
I32
Pulses per second Starting velocity parameter
MaxVel
I32
Pulses per second Tangential velocity parameter
Tacc
F64
Second
Specified acceleration time
Tdec
F64
Second
Specified deceleration time
m_curve
U16
Selection
1: Referenced against T-curve velocity
cross-section
2: Referenced against S-curve velocity
cross-section
m_r_a U16 Selection
0: Displacement in relative coordinates
1: Displacement in absolute coordinates