Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 369
Chapter 26 MPG and JOG Operation API | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012
26-5
NOTE
The above example is explained below:
Conditions:
Assuming one full turn of MPG is 100 clicks, MPG ratio X10, ratio=10,
Denominator=36, pulse_ratio =4, slope=1000, electronic gear ratio is
P1.44/P1.45 = 1
1 click of MPG = Number of motor rotation pulses (128000 * 10 / 100 * 10 /
36=355.55) * P1.45/P1.44
*This is sufficient to rotate the disc driven by the motor by 1 degree (1/360 *
1280000=355.55)
Formula:
One full turn of MPG (100 clicks) =
Number of motor rotation pulses (128000 * MPG ratio * ratio / Denominator) *
P1.45 / P1.44.
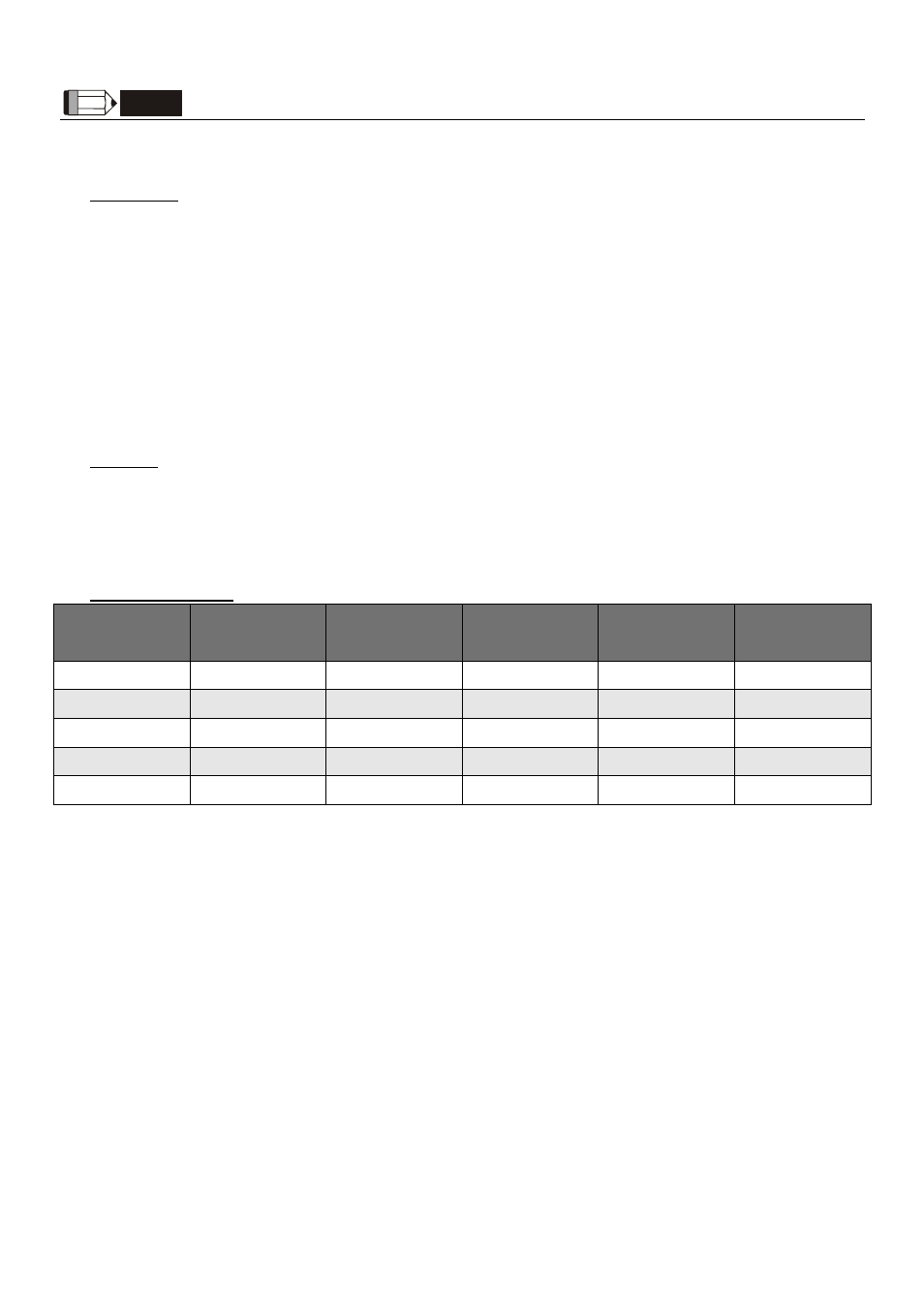
Conversion Ratio:
MPG ratio
Ratio
Denominator
Slope
MPG rotation
(1 full turn)
Servo rotation
X1 1 1 1000
100
128000
X10
1
1
1000
1000
1280000
X100 1 1 1000
10000
12800000
X1
2
1
1000
100
256000
X1 1 2 1000
100
64000
Example using Delta servo P1.44 and P1.45: MPG rotates X clicks, Servo moves Y pulses
A: Basic P1.44 / P1.45 adjustment ratio =640(1280000 / 2000).
B: Basic et_rm_mpg_axes_enable2 Ratio / Denominator value =1.
C: This is the current ratio for P1.44/p1.45 adjustment.
D: Need to find value of Ratio/Denominator in set_rm_mpg_axes_enable2.
Algorithm is: D = B * C / A * Y / X D = 0.5 * C / 640 * Y / X