Delta Electronics High-Speed PCI 12-Axis Motion Control Card PCI-DMC-A01 User Manual
Page 103
Chapter 3 Operating Principles | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012
3-81
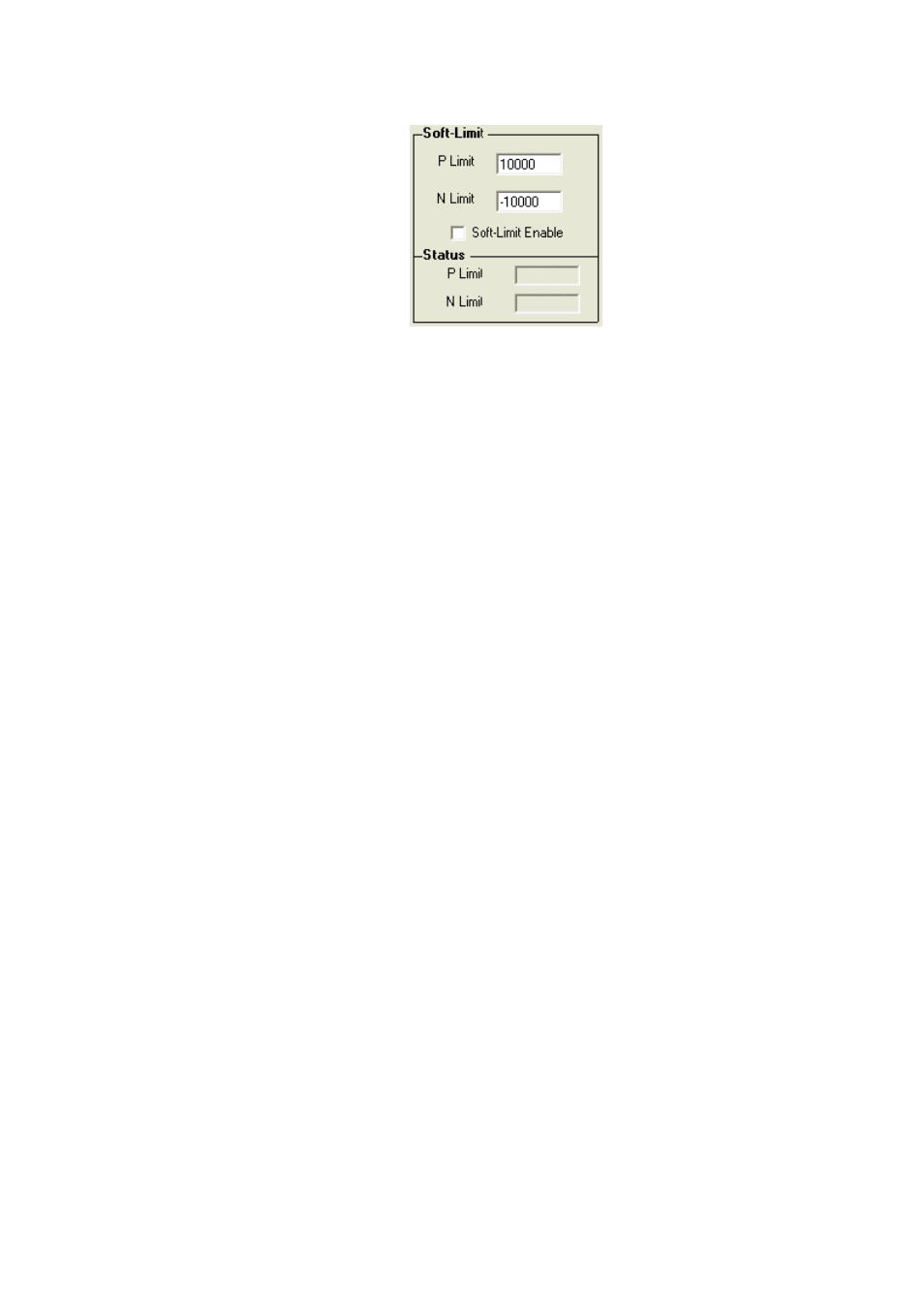
11) Enable software limit
Figure 3.113
If you wish to use the software limit function, you must first set the “P Limit” and “N
Limit” values then check the “Soft-limit Enable” checkbox to execute the following
procedure:
/* Start software limit configuration */
rt = _DMC_01_rm_04pi_md1_set_soft_limit(CardNo, NodeID, SlotID, PLimit, NLimit,
Enable);
// PLimit argument is the set value for positive limit; NLimit is the set value
for negative limit
※For a detailed description of software limit examples, please refer to section “3.13
Software Limit”.
12) Countine motion control
If you wish to carry out Countine motion, you must check the “Countine” checkbox
then click on the “” or “” button to execute the following procedure:
/* Countine motion */
rt = _DMC_01_rm_04pi_md1_v_move(CardNo, NodeID, SlotID, StrVel, MaxVel,
Tacc, Tdec, dir, m_curve);
13) Homing motion control
If you wish to carry out the Homing action, please click on the “Home” button to
execute the following procedure:
/* Set homing mode: 1~35, offset and velocity parameters */
rt = _DMC_01_set_home_config(gDMCCardNo, NodeID, SlotID, home_mode,
home_offset, StrVel, MaxVel, acc);
/* Start homing motion */
rt = _DMC_01_set_home_move(gDMCCardNo, NodeID, SlotID);
14) Change position
Under mode 1, RM04PI will replace the current position with the new position value.
You must click on the “Pch” button to execute the following procedure:
/* P Change */