12 application note – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 301
DV-300 Adjustable Speed Drives
——— FUNCTION DESCRIPTION ———
6
173
6.16.3.12 Application note
Dynamic modification of the integral gain of the PI block
In standard dancer applications, where there is not a build up of material, the PI gains are set to a constant value.
Where dancers are used in conjuction with material winding, the gains are compromise between low gain set-
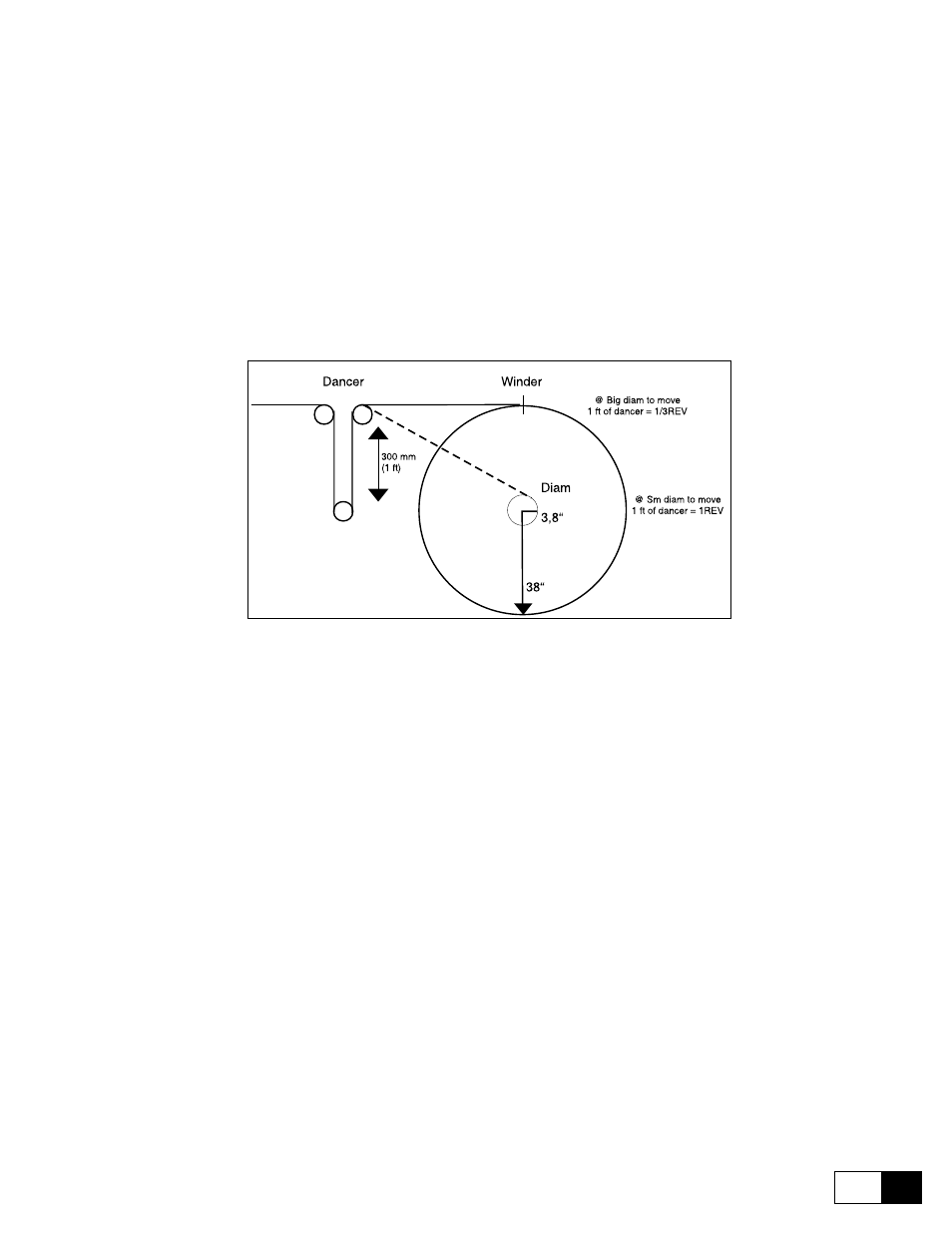
ting at large diameter, and high gain settings at a small diameter. Using the drawing as an example, it can be
seen that with a large diameter roll, the amount of material to move the dancer requires only a fraction of a turn.
At a small diameter, or empty roll, the center of the roll must rotate a whole turn to move the same amount of
material. Since the PI regulator is used to provide the correction in rpm to maintain the dancer position, having
the gain set by a single value is inadequate when used with a winder.
Figure 6.16.3.15: Example with small and large diameter
Better dancer control is realized if the gain of the PI is modified dynamically based on diameter. This can be
accomplished using LINKS function.
In case of higher ratio diameters, PI I gain PID could be dynamically changed according to the actual diameter.
At the moment this functionality has not been implemented as specific function.
For example to control a winder having a diameters ratio of 1/10.
The function LINK 1 is used to get a connection between the diameter and the value of the integral component
of the PI block.
The integral component of the regulator must have a behaviour inversely proportional to the diameter.
The value of the parameter PI output PID already follows this behaviour. Infact, it changes according to the
relation Φ
0
/ Φ
act
.
Where: Φ
0
= minimum roll diamenter
Φ
act
= actual roll diameter
The operation to carry out through the LINK parameter is:
PI output PID x KI = PI I gain PID
Where KI corresponds to the value of the integral component on minimum diameter condition.
For example, if at min diameter, the maximum speed with steady dancer in electric zero position with PI I gain
PID = 40%.