GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 205
DV-300 Adjustable Speed Drives
——— FUNCTION DESCRIPTION ———
6
77
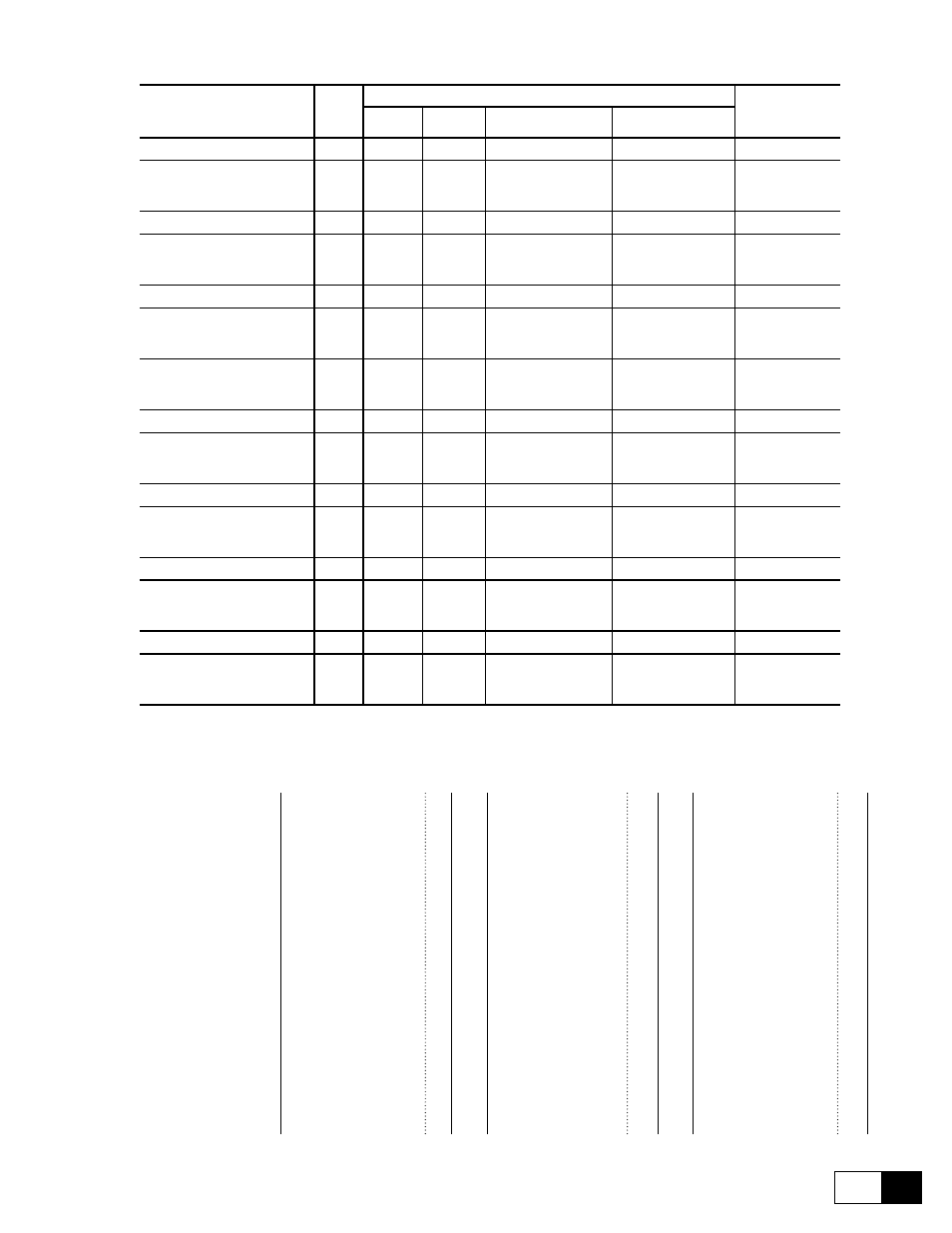
Parameter description
No.
Value
Standard
Configuration
min
max
Factory
American
Factory
European
Digital input 1
137
0
87
OFF (0)
OFF (0)
Inversion in 1
Enabled (1)
Disabled (0)
1267
0
1
Disabled (0)
Disabled (0)
Digital input 2
146
0
87
OFF (0)
OFF (0)
Inversion in 2
Enabled (1)
Disabled (0)
1268
0
1
Disabled (0)
Disabled (0)
Digital input 3
147
0
87
OFF (0)
OFF (0)
Inversion in 3
Enabled (1)
Disabled (0)
1269
0
1
Disabled (0)
Disabled (0)
Inversion in 4
Enabled (1)
Disabled (0)
1270
0
1
Disabled (0)
Disabled (0)
Digital in 5
149
0
87
OFF (0)
OFF (0)
Inversion in 5
Enabled (1)
Disabled (0)
1271
0
1
Disabled (0)
Disabled (0)
Digital in 6
150
0
87
OFF (0)
OFF (0)
Inversion in 6
Enabled (1)
Disabled (0)
1272
0
1
Disabled (0)
Disabled (0)
Digital in 7
151
0
87
OFF (0)
OFF (0)
Inversion in 7
Enabled (1)
Disabled (0)
1273
0
1
Disabled (0)
Disabled (0)
Digital in 8
152
0
87
OFF (0)
OFF (0)
Inversion in 8
Enabled (1)
Disabled (0)
1274
0
1
Disabled (0)
Disabled (0)
Digital input XX
Selection of the parameter that is addressed by the digital input concerned. The follow-
ing assignments are possible:
OFF
Motor pot reset
Motor pot up
Motor pot down
Motor pot sign +
Motor pot sign -
Jog +
Jog -
Failure reset
Torque reduct
Ramp out = 0
Ramp in = 0
Freeze ramp
Lock speed reg
Lock speed I
Auto capture
Input 1 sign +
1)
Input 1 sign -
1)
Input 2 sign +
1)
Input 2 sign -
1)
Input 3 sign +
1)
Input 3 sign -
1)
Zero torque
Speed sel 0
2)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Speed sel 1
2)
Speed sel 2
2)
Ramp sel 0
3)
Ramp sel 1
3)
Field loss
Enable flux reg
Enable flux weak
Pad A bit 0
Pad A bit 1
Pad A bit 2
Pad A bit 3
Pad A bit 4
Pad A bit 5
Pad A bit 6
Pad A bit 7
Forward sign
Reverse sign
An in 1 target
An in 2 target
An in 3 target
Enable droop
Enable PI PID
4)
Enable PD PID
4)
PI integral freeze
4)
24
25
26
27
29
30
31
32
33
34
35
36
37
38
39
44
45
46
47
48
49
52
53
54
PID offs. Sel
4)
PI central vs0
4)
PI central vs1
4)
Diameter calc
4)
Diam reset
Diam calc Dis
Torque winder EN
Line acc status
Line dec status
Line fstp status
Speed match
Diam inc/dec En
Wind/unwind
Diam preset sel0
Diam preset sel1
Taper enable
Speed demand En
Winder side
Enable PI-PD PID
Jog TW enable
Brake fbk
5)
Adapt Sel 1
6)
Adapt Sel 2
7)
55
56
57
58
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
86
87