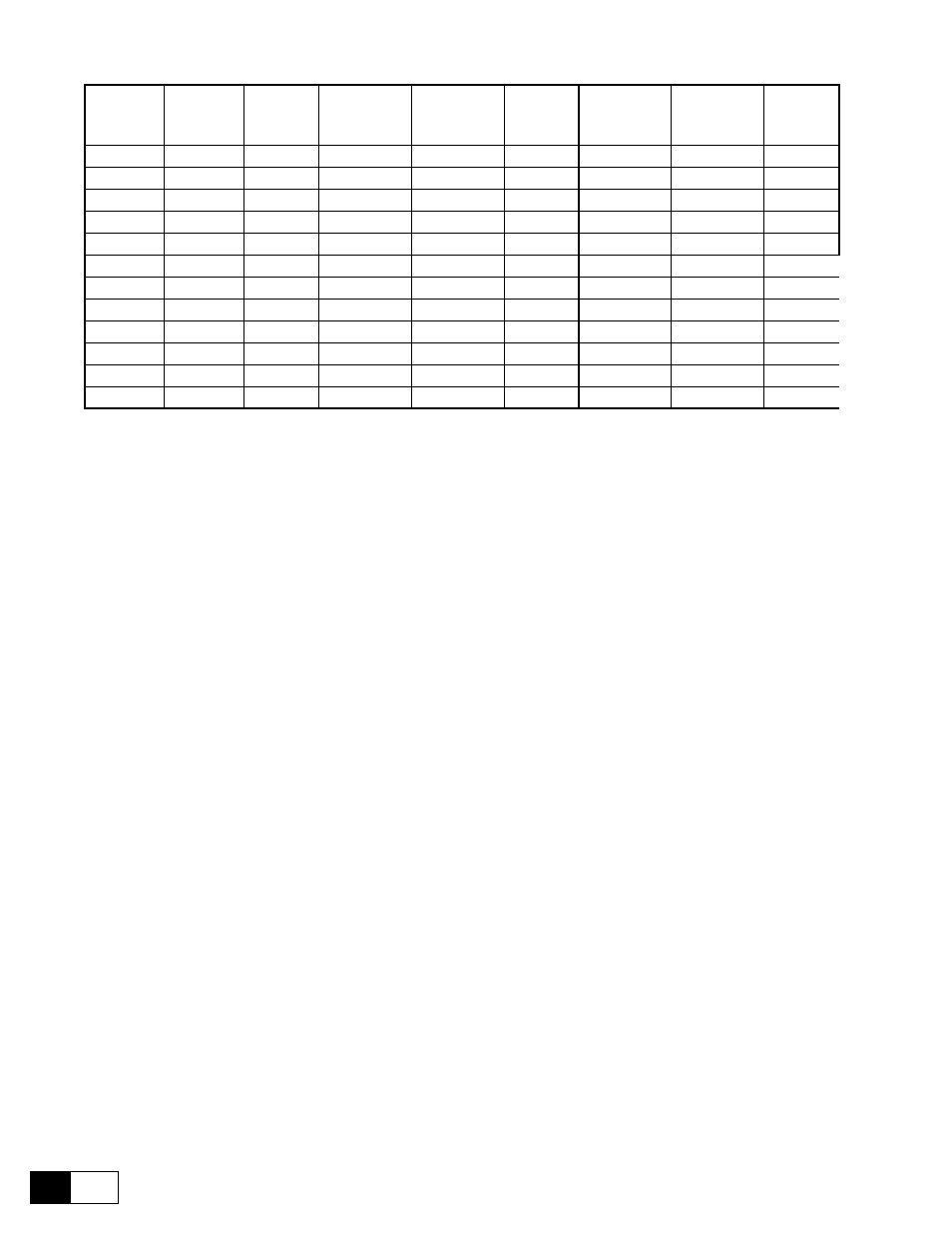
Table 6.14.6.1: i2t derating – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 230
GEI-100332Ga
——— FUNCTION DESCRIPTION ———
6
102
american
sizes (Q2/
Q4)
european
sizes (Q2/
Q4)
derating_fct american sizes
(Q2)
european sizes
(Q2)
derating_fct american sizes
(Q4)
european sizes
(Q4)
derating_fct
6KDV3017...
6KDV3020…
0.85
6KDV3800Q2..
6KDV310hQ2…
0.80
6KDV31300Q4… 6KDV31500Q4…
0.86
6KDV3035...
6KDV3040…
0.875
6KDV31000Q2… 6KDV31200Q2…
0.83
6KDV31350Q4… 6KDV31700Q4…
0.79
6KDV3056...
6KDV3070…
0.8
6KDV31300Q2… 6KDV31500Q2…
0.86
6KDV31500Q4… 6KDV32000Q4…
0.75
6KDV3088...
6KDV3110…
0.8
6KDV31400Q2… 6KDV31800Q2…
0.77
6KDV31800Q4… 6KDV32400Q4…
0.75
6KDV3112...
6KDV3140…
0.8
6KDV31500Q2… 6KDV32000Q2…
0.75
6KDV32000Q4… 6KDV32700Q4…
0.74
6KDV3148...
6KDV3185…
0.8
6KDV31800Q2… 6KDV32400Q2…
0.75
6KDV3224...
6KDV3280…
0.8
6KDV32000Q2… 6KDV32700Q2…
0.74
6KDV3280...
6KDV3350…
0.8
6KDV32200Q2… 6KDV32900Q2…
0.76
6KDV3336...
6KDV3420…
0.8
6KDV32350Q2… 6KDV33300Q2…
0.71
6KDV3400...
6KDV3500…
0.8
6KDV3450...
6KDV3650…
0.69
6KDV3560...
6KDV3770…
0.72
Table 6.14.6.1: I2t derating
Overload current
Armature current that is permissible during the overload time (set with Overload time).
It is always 200% as a maximum of the active current at Full load curr and therefore
proportional to the torque.
Base current
Armature current that is permissible during the pause time (set with Pause time). The
percentage refers to the active current at Full load curr.
Overload time
Maximum time in which the Overload current is permissible.
Pause time
Minimum time between two Overload cycles. During this time the Base current is permis-
sible.
Motor I2t accum
It gives a percentage definition of the integration of the rms current. 100% = trip level motor
I2t . Motor I2t accum is equal to 100% if (Overload current
2
x Overload time) is reached
but in any case with a maximum limit of [(150% FLC)
2
x 60 sec].
Motor ovrld preal.
This signal can be set on a digital output (code 65). It goes to the high level (1) when
Motor I2t accum = 90 %. It goes to low level (0) when Motor I2t accum = 0.
Drive I2t accum
It gives a percentage definition of the integration of the rms current. 100% = trip level
drive I2t. Drive I2t accum is equal to 100% if [(150% Derated Drive Current
(*)
)
2
x 60
sec] is reached.
Drive ovrld preal.
This signal can be set on a digital output (code 66). It goes to the high level (1) when
Drive I2t accum = 90 %. It goes to low level (0) when Drive I2t accum = 0.
Overld available
Indicates whether an overload is possible this very instant or whether this is not yet the
case, due to the set cycle (Pause time not yet expired).
High Overload possible
Low Overload currently not possible
Overload state
If the Overload mode parameter is defined so that the current is not limited by the
Overload control, the Overload state can be used to determine whether the current is
within the set limits or not.
High Current exceeds the set limits
Low Current does not exceed the set limits.
n
ote
!
Overload state is not a latched output. For I2t, it is can be considered as a one shot.
The Overload control is enabled with the Enable overload parameter. It can be used to protect the drive or motor