6 overload control – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 228
GEI-100332Ga
——— FUNCTION DESCRIPTION ———
6
100
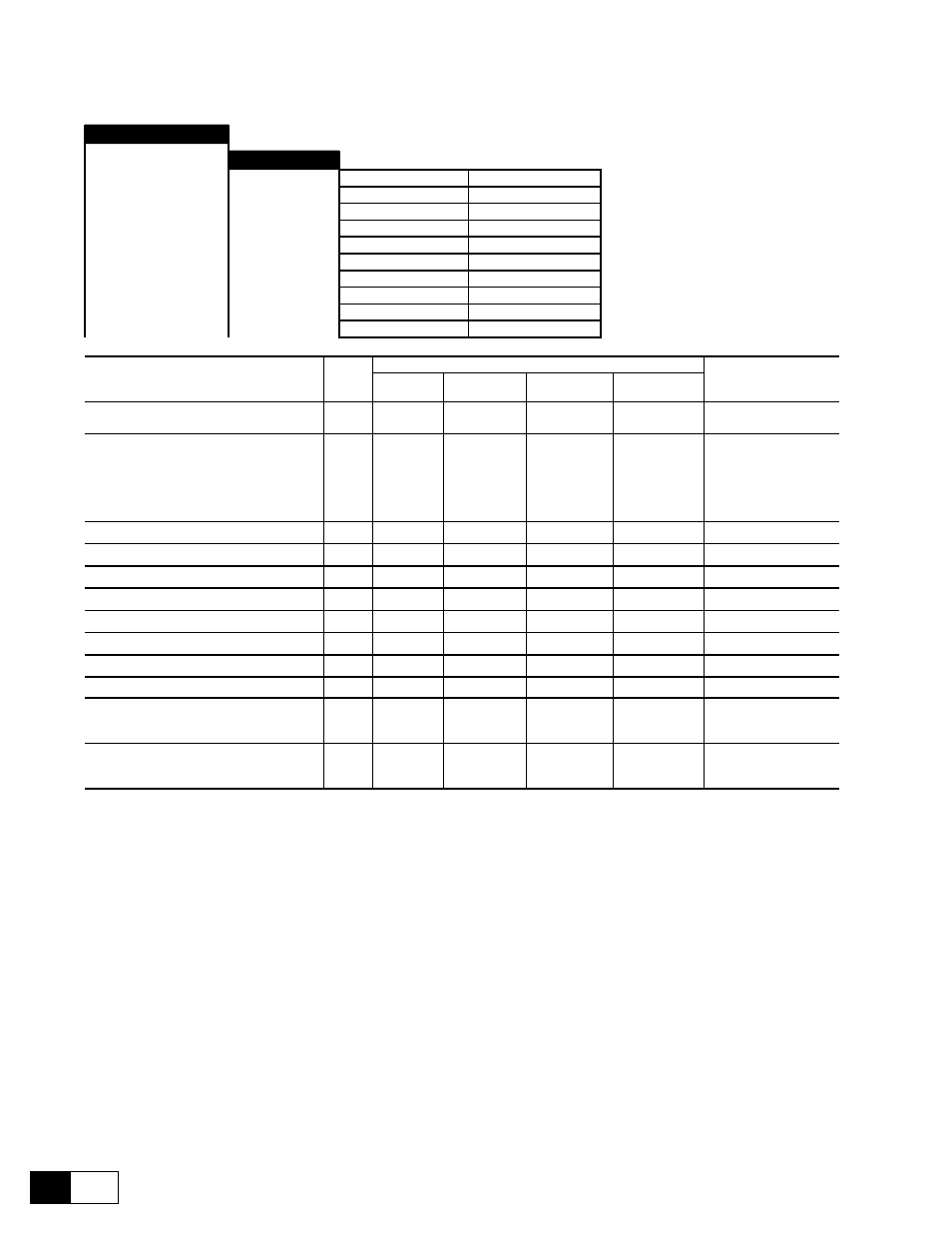
6.14.6 Overload control
FUNCTIONS
Overload contr
[309]
Enable overload
[318]
Overload mode
[312]
Overload current [%]
[313]
Base current [%]
[310]
Overload time [s]
[1289]
Motor ovrld preal.
[655]
Motor I2t accum
[1438]
Drive ovrld preal.
[1439]
Drive I2t accum
[311]
Pause time [s]
Parameter description
No.
Value
Standard
Configuration
min
max
Factory
American
Factory
European
Enable overload
Enabled (1) / Disabled (0)
309
0
1
Enabled
Disabled
-
Overload mode
Curr limited (0)
Curr not limited (1)
I2t Motor (2)
I2t Drive (3)
I2t Motor & Drv (4)
318
0
4
I
2
t Motor
Curr limited
-
Overload current [%]
312
P313
200
150
100
Base current [%]
313
0
P312 < 100
100
80
-
Overload time [s]
310
0
65535
60
30
-
Motor ovrld preal.
1289
0
1
-
-
Motor I2t accum
655
0,00
100,00
-
-
Drive ovrld preal.
1438
0
1
-
-
Drive I2t accum
1439
0,00
100,00
-
-
Pause time [s]
311
0
65535
540
300
-
Overld available
Overload not possible (0)
Overload possible (1)
406
0
1
-
-
Digital outp.4 *
Overload state
Current limit value (0)
Current > limit value (1)
407
0
1
-
-
*
*
This parameter can be assigned to a programmable digital output.
The Overload control function allows an overcurrent for a limited time that can also exceed the rated current of
the inverter. It is used in order to provide the drive with an increased acceleration torque or for example to allow
peak loads, such as with cyclical loads characteristis.
Enable overload
Enabled
Overload control is enabled
Disabled
Overload control is disabled
Overload mode
Curr limited
The armature current is restricted to the limits set by the Over-
load control (size and duration of overcurrent).
Curr not limited
The armature current is not limited by the Overload con-
trol. However, an alarm is possible via the Overload state
parameter. This alarm indicates whether the current is within
the set limits or not.
I2t Motor
• If Motor I2t ovrld is set to Activity = Ignore,
the current is reduced from Overload current parameter value
to Base current parameter value when Motor I2t accum =