3 torque current reference (t current ref), Figure 6.4.3.1: torque current reference – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 148
GEI-100332Ga
——— FUNCTION DESCRIPTION ———
6
20
The total speed reference value consists of the signed addition of Speed ref 1 and Speed ref 2.
Example 1:
Speed ref 1 = + 50 % Speed ref 2 = + 30 %
Speed ref = 50 % + 30 % = 80 %
Example 2:
Speed ref 1 = + 40 % Speed ref 2 = - 60 %
Speed ref = 40 % - 60 % = - 20 %
0 ... 10 V, 0 ... 20 mA and 4 ... 20 mA signals can be used when setting the reference value via terminals. The
speed reference value has an upper and a lower limit.
If the ramp is selected, (Enable ramp parameter= Enabled), the reference value input Speed ref 1 is automati-
cally linked with the ramp output.
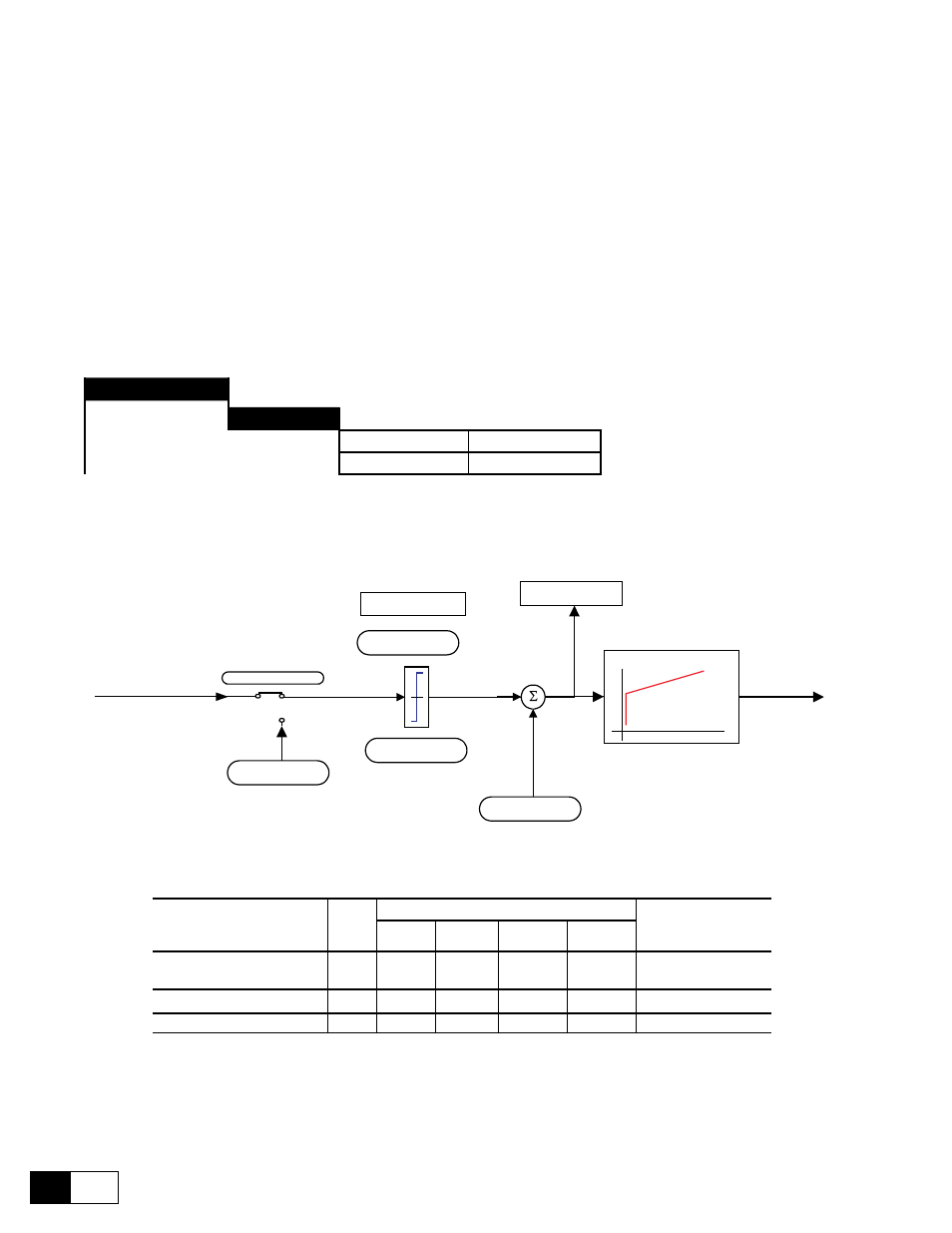
6.4.3 Torque current reference (T current ref)
INPUT VARIABLES
T current ref
[39]
T current ref 1 [%]
[40]
T current ref 2 [%]
The current reference value is proportional to the armature current of the motor and determines the torque, the
polarity determines the torque direction. For most applications T current Ref comes from the speed regulator
output. T current ref 2 can also be used as a correction value.
To Motor Control
Torque current regulator
+
+
T
From Speed regulator
T current ref
T current lim +
136 %
T current lim -
136 %
T current ref 2
0 %
Curr limit state
Enable spd reg
T current ref 1
0 %
Figure 6.4.3.1: Torque current reference
Parameter description
No.
Value
Standard
Configuration
min
max
Factory
American
Factory
European
T current ref 1 [%]
39
-200
+200
see 6.4.3
0
0
Speed regulator
output *
T current ref 2 [%]
40
-200
+200
0.00
0.00
*
T current ref [%]
41
-200
+200
-
-
**
* This function can be assigned to one of the freely programmable analog inputs.
** This parameter can be assigned to a freely programmable analog output.