Figure 6.16.3.7: diameter calculation – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 280
GEI-100332Ga
——— FUNCTION DESCRIPTION ———
6
152
Diameter calc
Enabling of the initial function of diameter calculation.
The calculation will be enabled by setting Diameter calc = Enable.
If Diameter calc has been programmed on a digital input, this must be brought to a
high logic level.
Positioning spd
Motor speed at which the dancer is at its central working position, during the calculation
phase of the initial diameter.
Max deviation
Value expressed in count of D/A which corresponds to the maximum shift allowed by
the dancer. This value will be associated with the starting measurement of the dancer
movement during the calculation of the initial diameter.
During the preliminary phase of the commissioning, it is necessary to carry out the self-calibration of the analog
inputs, so at the fullrange position of the dancer they will correspond, whatever was the value of the analog input,
at 10000 counts. The parameter Max deviation, in order to guarantee a precise calculation of the movement ,
must be set at a value slightly lower. (standard Max deviation = 8000).
Gear box ratio
Ratio reduction between the motor and the roll (< = 1).
Dancer constant
It expresses the measure in mm, the total bunching of material in the dancer.
Dancer constant = ( ∆ x
x
2) 2
L
M
Gear box ratio
Dancer constant = ( ∆L x
x
2) 4
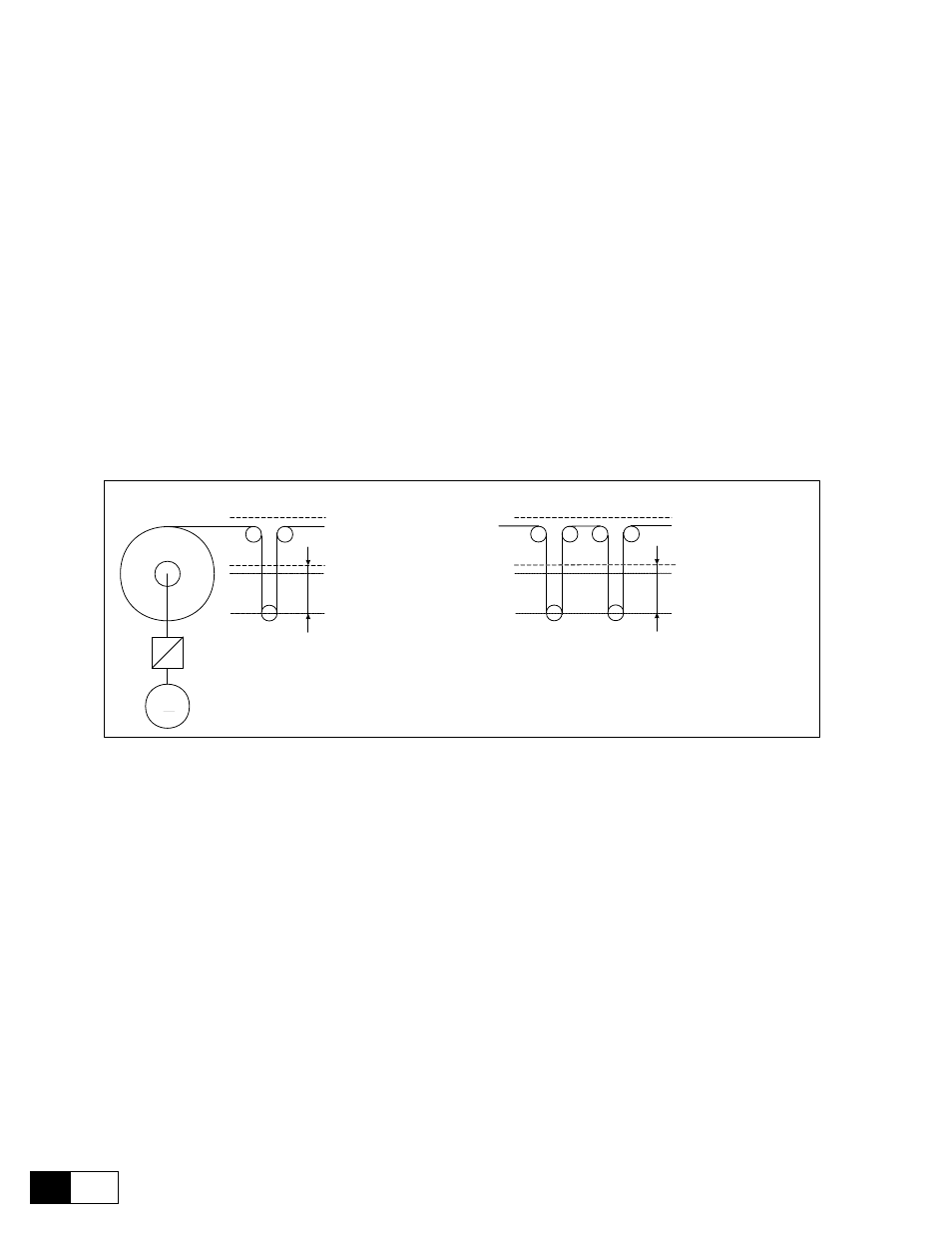
Dancer
Winder/Unwinder
∆L
electrical 0
Central position
of working
Dancer
Upper limit
switch = +1000 count
Lower limit
switch = -1000 count
∆L
electrical 0
Central position
of working
Upper limit
switch = +1000 count
Lower limit
switch = -1000 count
Two pitches dancer
One pitch dancer
Figure 6.16.3.7: Diameter calculation
Measurement of Dancer constant:
With dancer in lower fullrange position, perform the self-calibration of the analog input programmed as PID
feed-back.
Set the keypad of the drive on the parameter PID feed-back.
Measure and multiply by 2, the distance in mm between the lower mechanical fullrange and the position of the
dancer that, on the parameter PID feed-back, will display 0 (position of electrical 0).
Multiply the above calculated value by 2 if the dancer has only one pitch, by 4 if the dancer has two pitches and
so on, as per the figure above.
Minimum diameter Min. value of core diameter expressed in cm.