GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 276
GEI-100332Ga
——— FUNCTION DESCRIPTION ———
6
148
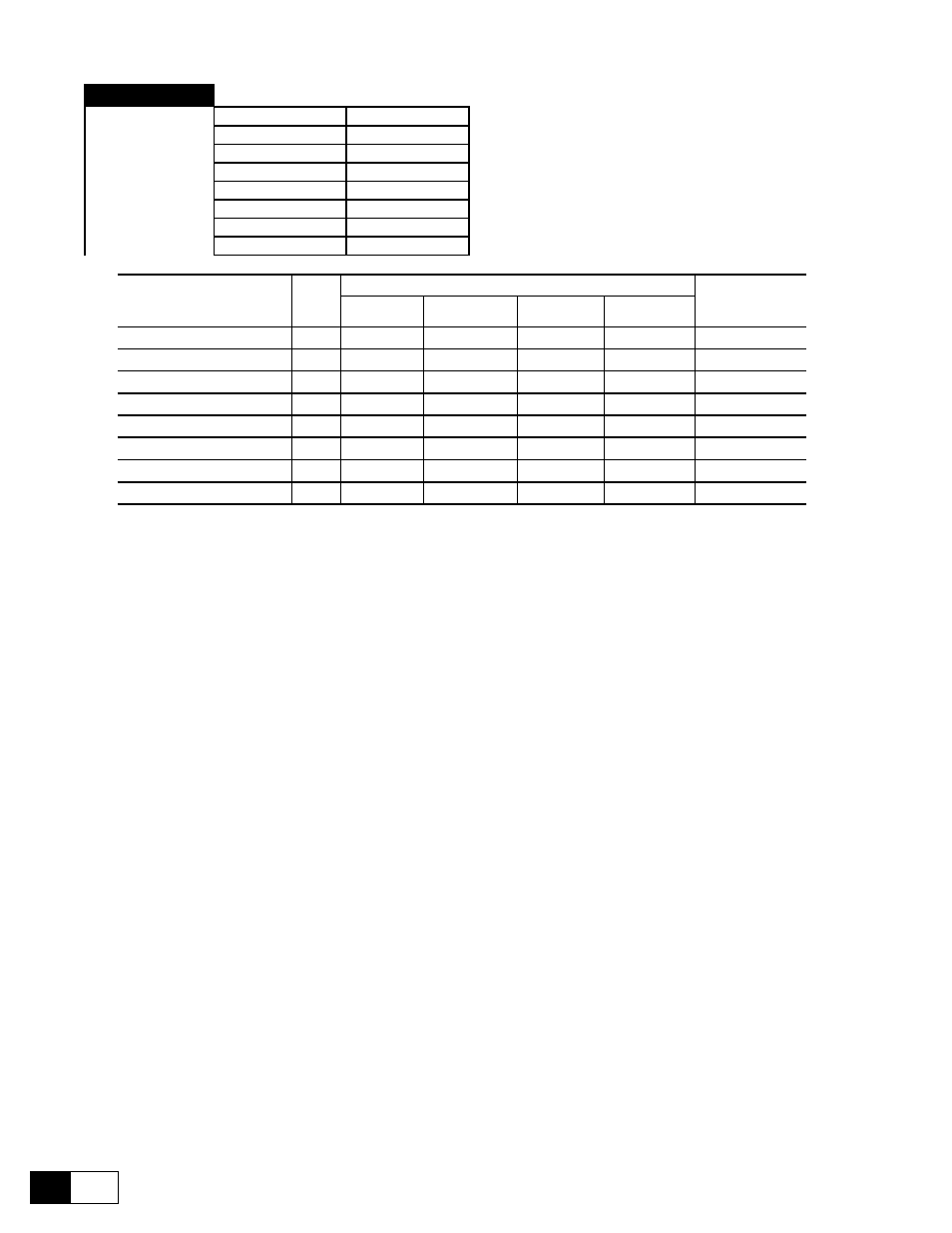
PD control
[768]
PD P gain 1 PID [%]
[766]
PD D gain 1 PID [%]
[788]
PD P gain 2 PID [%]
[789]
PD D gain 2 PID [%]
[790]
PD P gain 3 PID [%]
[791]
PD D gain 3 PID[%]
[767]
PD D filter PID [ms]
[421]
PD output PID
Parameter description
No.
Value
Standard
Configuration
min
max
Factory
American
Factory
European
PD P gain 1 PID [%]
768
0.00
100.00
10.00
10.00
PD D gain 1 PID [%]
766
0.00
100.00
1.00
1.00
PD P gain 2 PID [%]
788
0.00
100.00
10.00
10.00
PD D gain 2 PID [%]
789
0.00
100.00
1.00
1.00
PD P gain 3 PID [%]
790
0.00
100.00
10.00
10.00
PD D gain 3 PID[%]
791
0.00
100.00
1.00
1.00
PD D filter PID [ms]
767
0
1000
0
0
PD output PID
421
-10000
+10000
0
0
The gains of the block can remain fixed and programmed in this case through the parameters PD P gain 1 PID
and PD I gain 1 PID, or changed depending on machine parameters, through the function Adap spd reg. In this
case the gains come from PD P gain 1-2-3 PID and PD I gain 1-2-3 PID.
For example, it is possible to modify, dynamically, the gains of PD block according to the speed, to a regula-
tion parameter internal to the drive, or to an analog input proportional to the unit related to the machine. The
behaviour of the regulator can be so configured to meet the needs of the machine.
n
ote
:
When Adap Spd reg has been enabled (paragraph 6.13.2. of the manual), it operates both on
the PID function and on the gains of the speed regulator. So it is necessary to appropriately
program all relative parameters. If one wishes to modify only the gains of the speed regulator
and keep fixed the gains of the PID function, it is necessary set the three proportional gains
and integral gains of the PD block at the same value. The same is valid in case the PID gains
have to be modified and the speed regulator gains must remain fixed.
PD P gain 1
Proportional gain 1 of the block PD (its selection depends on the eventual enabling of
the function Adap Spd reg and its configuration).
PD D gain 1
Derivative gain 1 of block PD (its selection depends on the eventual enabling of the
function Adap Spd reg and its configuration).
PD P gain 2
Proportional gain 2 of the block PD (its selection depends on the eventual enabling of
the function Adap Spd reg and its configuration).
PD D gain 2
Derivative gain 2 of block PD (its selection depends on the eventual enabling of the
function Adap Spd reg and its configuration).
PD P gain 3
Proportional gain 3 of the block PD (its selection depends on the eventual enabling of
the function Adap Spd reg and its configuration).
PD D gain 3
Derivative gain 3 of block PD (its selection depends on the eventual enabling of the
function Adap Spd reg and its configuration).
PD D filter PID
Time constant of the filter from the derivative side.
PD output PID
PD block output.