Figure 6.13.2.1: adaptive of the speed regulator – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 211
DV-300 Adjustable Speed Drives
——— FUNCTION DESCRIPTION ———
6
83
Adap joint 2
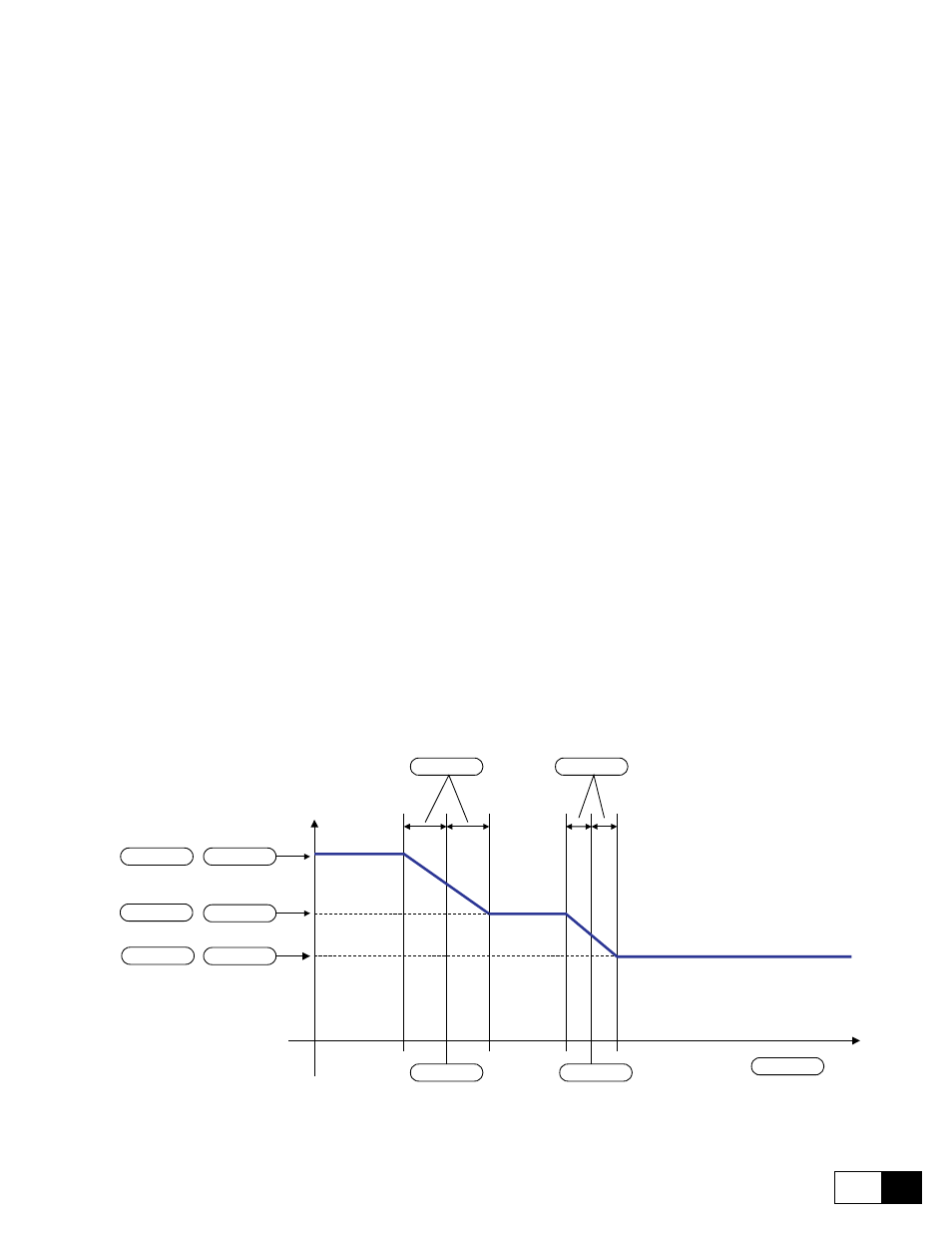
Defines a range around Adap Speed 2 in which there is a linear change in gain from
parameter set 2 to parameter set 3 in order to prevent jumps in the behavior of the regu-
lator. It is defined as a percentage of Speed base value.
Adap P gain 1
Proportional gain for the range from zero to Adap speed 1. Defined as a percentage of
Speed P base.
Adap I gain 1
Integral gain for the range from zero to Adap speed 1. Defined as a percentage of Speed I base.
Adap P gain 2
Proportional gain for the range from Adap speed 1 to Adap speed 2. Defined as a
percentage of Speed P base.
Adap I gain 2
Integral gain for the range from Adap speed 1 to Adap speed 2. Defined as a percent-
age of Speed I base.
Adap P gain 3
Proportional gain for the range above Adap speed 2. Defined as a percentage of Speed
P base.
Adap I gain 3
Integral gain for the range above Adap speed 2. Defined as a percentage of Speed I base.
Adap P gain 4
Proportional gain for the range above Adap speed 3. Defined as a percentage of Speed
P base.
Adap I gain 4
Integral gain for the range above Adap speed 3. Defined as a percentage of Speed I base.
In order to activate Adaptive speed regulation, the function must be enabled with the Enable spd adap parameter.
Normally the gain depends on the speed of the drive. It can, however, also vary according to another variable,
defined by the Adap reference parameter. This must be selected with the Select adap type parameter.
The Adap speed 1 and Adap speed 2 parameters are used to define the three ranges that may have different
gains. A parameter set can be defined for each of these ranges, with each set containing an individually definable
P and I component.
The Adap joint 1 and Adap joint 2 parameters ensure a smooth transition between the different parameter sets.
The fields must be defined so that Adap joint 1 and Adap joint 2 do not overlap.
When the Adaptive speed regulation is enabled (Enable spd adap = Enabled) the Speed P and Speed I pa-
rameters have no effect. They still retain their value and are effective after any disabling of the adaptive speed
regulation.
When the drive is not enabled, the gain of the speed regulator is determined by the zero speed logic. See section
6.7.2, “Zero speed logic”.
Adap P gain 1
10 %
Adap P gain 2
10 %
Adap P gain 3
10 %
Adap I gain 1
1 %
Adap I gain 2
1 %
Adap I gain 3
1 %
Adap speed 1
20.3 %
Adap speed 2
40.7 %
Adap joint 1
6.1 %
Adap joint 2
6.1 %
Adap reference
1000 rpm
Figure 6.13.2.1: Adaptive of the speed regulator